Mitkä ovat tärkeitä näkökohtia cobottien turvallisuuden arvioinnissa?
Julkaisija DigiKeyn kirjoittajat Pohjois-Amerikassa
2024-04-03
Yhteistyörobotit (cobotit) on suunniteltu työskentelemään ihmisten kanssa ja tukemaan joustavaa tuotantoa Teollisuus 4.0 -tehtaissa. Cobotit ovat perinteisiin teollisuusrobotteihin verrattuna yksinkertaisempia, helpompia asentaa eivätkä ne vaadi turvallisesti eristettyjä työtiloja. Koska cobotit on suunniteltu työskentelemään ihmisten kanssa, ne eroavat rakenteellisesti muista teollisuusroboteista ja sisältävät sellaisia ominaisuuksia kuten törmäysten tunnistusjärjestelmä, voimatakaisinkytkentä, elastiset aktuaattorit ja alhaisen inertian servomoottorit.
Coboteille on kehitetty niiden erilaisen rakenteen vuoksi omat turvallisuusstandardinsa. Kansainvälisen standardisointijärjestön tekninen spesifikaatio (ISO/TS) 15066 määrittelee teollisuusrobotteja ja niiden työympäristöjä koskevat turvallisuusvaatimukset. Se täydentää yhteistyörobottien käyttöä koskevien standardien ISO 10218-1 ja ISO 10218-2 vaatimuksia ja ohjeita.
Tässä artikkelissa luodaan lyhyt katsaus standardin ISO/TS 15066 vaatimuksiin ja niiden yhdenmukaisuuteen standardien ISO 10218-1 ja 10218-2 kanssa. Sen jälkeen artikkelissa pohditaan yhteistyön kompleksisuuksia, mukaan lukien sitä, miten yhteinen työtila määritellään. Artikkelissa tarkastellaan myös robottien turvalliseen käyttöön liittyviä tekijöitä, kuten cobotteihin sisäänrakennettuja turvallisuusominaisuuksia ja tarvittavia ulkoisia turvallisuustoimintoja. Lisäksi siinä esitellään tällaisia esimerkkilaitteita, kuten läheisyysantureita, valoverhoja ja turvakontaktimattoja. Lopuksi käsitellään lyhyesti joitakin erityisesti cobottien käyttöturvallisuuteen liittyviä näkökohtia.
Teollisuusroboteille ja coboteille on olemassa useita tärkeitä turvallisuusstandardeja. ISO/TS 15066 -standardi määrittelee yksityiskohtaisesti teollisten cobottijärjestelmien ja työympäristön turvallisuusvaatimukset, ja sen tarkoitus on laajentaa ja täydentää aiempien standardien, kuten ISO 10218 -sarjan, rajallisia vaatimuksia. ISO 10218-1 keskittyy yleisiin robotteihin ja robottilaitteisiin, kun taas ISO 10218-2 keskittyy robottijärjestelmiin ja niiden integrointiin. American National Standards Institute/Robotics Industry Associationin (ANSI/RIA) R15.06 on standardien ISO 10218-1 ja ISO 10218-2 kansallinen versio Yhdysvalloissa.
Yhteistyön kompleksisuudet
Ennen cobottiturvallisuuden yksityiskohtiin siirtymistä on hyödyllistä määritellä käsite ”yhteistyö”. Yhteistyö on robotiikassa kompleksinen aihe ja se kattaa kolme tekijää:
- ANSI/RIA R15.06 -standardin mukaan cobotti on ”robotti, joka on suunniteltu suoraan vuorovaikutukseen ihmisen kanssa määritellyssä yhteisessä työtilassa”.
- Yhteistyö on ISO/TS 15066 -standardin mukaan ”toimintaa, jossa tähän tarkoitukseen suunniteltu robottijärjestelmä ja käyttäjä työskentelevät yhteisessä työtilassa”.
- Yhteinen työtila on ANSI/RIA R15.06 -standardin mukaan ”suojatussa ympäristössä oleva työtila, jossa robotti ja ihminen voivat suorittaa tehtäviä samanaikaisesti tuotantotoiminnan aikana”.
Keskeistä on yhteisen työtilan määritelmä ”suojatun ympäristön sisällä”. Suojattu ympäristö kattaa cobottiin sisältyvien yleisten turvatoimintojen lisäksi turvallisuutta lisäävän kerroksen.
Cobotteihin integroituihin yleisiin suojausominaisuuksiin kuuluvat esimerkiksi kontaktin tunnistusjärjestelmät, jotka perustuvat jokaisen nivelen vääntömomenttimittauksiin ja jotka suorittavat valvontaa odottamattomien iskujen, esteiden tai liiallisten voimien tai vääntömomenttien varalta. Lisäksi järjestelmässä on oltava automaattinen jarrutusjärjestelmä ja jarrujen manuaalinen vapautus, jotta vartta voidaan siirtää ilman virtaa.
Erityisesti on otettava huomioon cobotin odottamaton kontakti ihmiseen. Standardit määräävät, että kontakti ihmisen päähän on estettävä kaikkialla. Lisäksi standardi jakaa kehon 29 erityisalueeseen ja erittelee yksityiskohtaiset rajoitukset kahdelle kontaktityypille:
- Transientti kontakti on liikkuva, dynaaminen tapahtuma, jossa cobotti törmää ihmiseen. Rajoitukset perustuvat sijaintiin, inertiaan ja suhteelliseen nopeuteen.
- Kvasistaattinen kontakti tapahtuu, kun kehon osa juuttuu cobotin ja pinnan väliin. Rajoitukset perustuvat murskaantumis- ja puristumisvaikutuksiin liittyvään paineeseen ja voimaan.
Spesifikaatio tarjoaa sovellusnäkökulmiin perustuvaa opastusta, mutta ei absoluuttisia rajoja. Se toteaa myös, että ohjeet ovat informatiivisia ja heijastavat nykyisiä parhaita käytäntöjä, koska ihmisten ja robottien välinen yhteistyö on uusi ala ja tutkimus jatkuu.
Yhteistyön jatkumo
Ei ole olemassa yhtä ainoaa yhteistyösovellusta. Ihmiset ja robotit voivat olla vuorovaikutuksessa ja tehdä yhteistyötä monin eri tavoin. Yhteistyösovellukset ulottuvat rinnakkaiselosta, jossa robotti pysähtyy virta kytkettynä ihmisen astuessa yhteiseen työtilaan, vuorovaikutukselliseen toimintaan, jossa ihminen koskettaa cobottia sen ollessa toiminnassa (kuva 1).
 Kuva 1: Ihmisen ja robotin yhteistyö sisältää laajan valikoiman mahdollisia vuorovaikutustasoja. (Kuvan lähde: SICK)
Kuva 1: Ihmisen ja robotin yhteistyö sisältää laajan valikoiman mahdollisia vuorovaikutustasoja. (Kuvan lähde: SICK)
Yksittäisten yhteistyösovellusten turvallisuustarpeiden tunnistamiseen tarvitaan riskinarviointi. Se kattaa sovellukseen liittyvien vaarojen ja riskien tunnistamisen, arvioinnin ja vähentämisen. ISO 10218 sisältää luettelon turvallisuusominaisuuksista, jotka voivat soveltua erilaisiin olosuhteisiin, mutta ei lopullisia vaatimuksia. ISO/TS 15066 lisää yksityiskohtia cobottien riskinarviointiin. Riskinarvioinnin tavoitteena on kussakin tapauksessa tunnistaa ulkoiset turvalaitteet ja -järjestelmät, jotka tarvitaan varmistamaan yhteistyösovellusten turvallinen toteutus.
Voit sukeltaa syvemmälle riskinarviointiin ja robotteihin artikkelissa ”Safely and Efficiently Integrating AMRs into Industry 4.0 Operations for Maximum Benefit” (Autonomisten mobiilirobottien turvallinen ja tehokas integrointi Teollisuus 4.0 -toimintoihin mahdollisimman suuren hyödyn saavuttamiseksi).
Suojaus ja tehokkuus
Vaikka cobotit onkin suunniteltu turvalliseen toimintaan, ylimääräiset suojakerrokset voivat parantaa yhteistyösovellusten tehokkuutta. Kun henkilö astuu yhteiseen työtilaan, josta puuttuu lisäsuojaus, ISO/TS 15066 määrää maksiminopeudeksi 0,25 metriä sekunnissa (m/s) akselia kohti. Useimmille coboteille tämä on hyvin hidas nopeus.
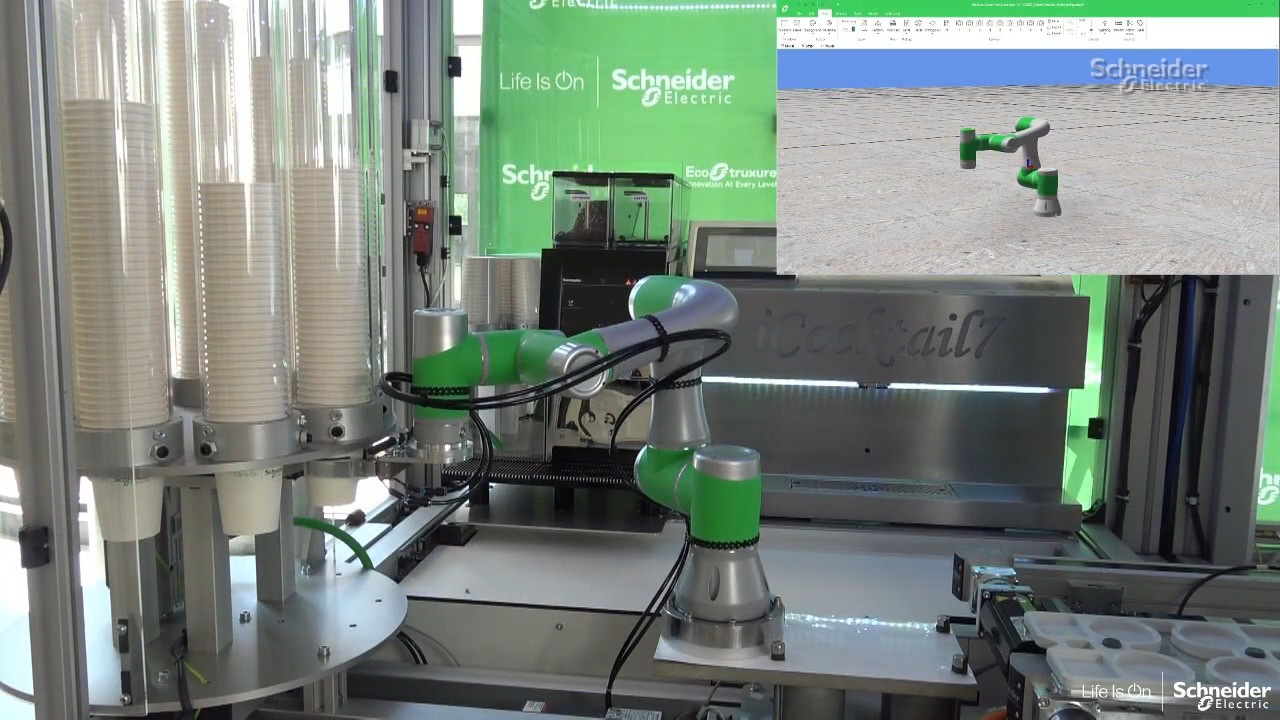
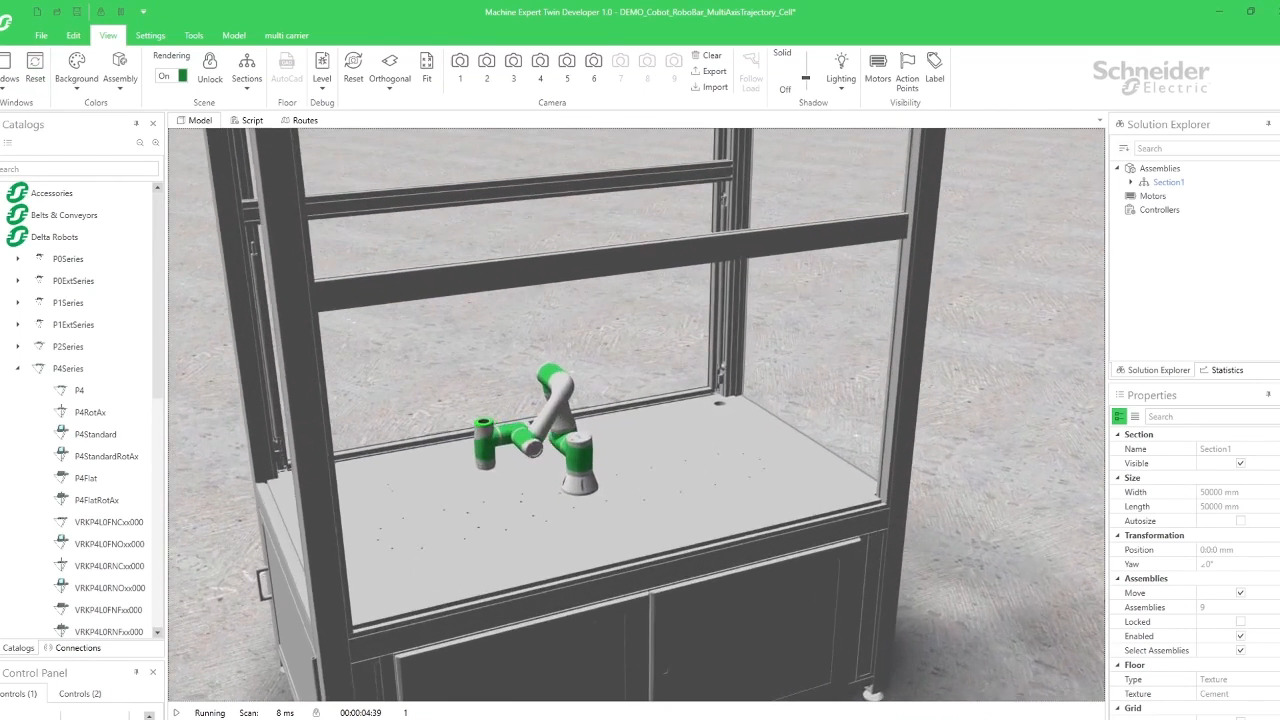
Esimerkiksi Schneider Electricin Lexium-cobotin XMRL12S0000 enimmäishyötykuorma on 12 kilogrammaa (kg), toimintasäde (toiminta-alue) 1327 millimetriä (mm), paikannustarkkuus ±0,03 mm ja työkalun pään enimmäisnopeus 3 metriä sekunnissa (m/s), mikä on 12 kertaa nopeampi kuin ISO/TS 15066 -standardin sallima enimmäisnopeus silloin, kun yhteisessä työtilassa on ihminen (kuva 2).
 Kuva 2: Tämä cobotti pystyy liikkumaan 12 kertaa nopeammin kuin ISO/TS 15066 -standardin sallima maksiminopeus silloin, kun yhteisessä työtilassa on ihminen. (Kuvan lähde: Schneider Electric)
Kuva 2: Tämä cobotti pystyy liikkumaan 12 kertaa nopeammin kuin ISO/TS 15066 -standardin sallima maksiminopeus silloin, kun yhteisessä työtilassa on ihminen. (Kuvan lähde: Schneider Electric)
Cobotti voi toimia monissa sovelluksissa yksin pitkiä aikoja. Näin ollen ihmisten läsnäolon tai poissaolon tunnistaminen yhteisessä työtilassa voi mahdollistaa paljon nopeamman toiminnan ja korkeamman tehokkuuden silloin, kun ketään ei ole paikalla. Yleisiä laitteita ihmisten läsnäolon tunnistukseen ovat esimerkiksi turvaskannerit, valoverhot ja turvakontaktilattiamatot. Kukin tekniikka tarjoaa omat etunsa ja niitä käytetäänkin usein yhdessä.
Turvaskannerit
Turvaskannerit valvovat tiettyä aluetta ihmisten läsnäolon tunnistamiseksi. Ne voivat määrittää, kuinka kaukana henkilö on, ja käyttää erilaisia varoitusvyöhykkeitä aktiivisen turvavyöhykkeen lisäksi.
Omronin malli OS32C-SP1-4M on hyvä esimerkki turvalaserskannerista, joka on suunniteltu käytettäväksi yhdessä cobottien kanssa. Sen turvallisuussäde on jopa 4 metriä (m), ja se voi tukea useita varoitusvyöhykkeitä jopa 15 metriin asti. Se sisältää 70 turva- ja varoitusvyöhykeyhdistelmien perussarjaa mahdollistaen monimutkaiset yhteiset työtilat. Lisäksi objektin vähimmäisresoluutio voidaan asettaa 30, 40, 50 tai 70 millimetriin, ja vasteaika voi vaihdella 80 millisekunnista (ms) 680 millisekuntiin, mikä lisää käyttöjoustavuutta entisestään (kuva 3).
 Kuva 3: Tämän turvaskannerin turvallisuussäde on jopa 4 m ja se voi tukea useita varoitusvyöhykkeitä jopa 15 metrin etäisyyteen saakka. (Kuvan lähde: DigiKey)
Kuva 3: Tämän turvaskannerin turvallisuussäde on jopa 4 m ja se voi tukea useita varoitusvyöhykkeitä jopa 15 metrin etäisyyteen saakka. (Kuvan lähde: DigiKey)
Valoverhot
Valoverhot pystyvät havaitsemaan ihmisten läsnäolon, ja ne voidaan suunnitella tunnistamaan erikokoisia objekteja, kuten sormia tai käsiä. Toisin kuin turvaskannerit, valoverhot eivät mittaa etäisyyttä. Ne lähettävät sarjan valosäteitä lineaaristen lähetin- ja vastaanotinryhmien välillä ja voivat tunnistaa, kun jokin objekti katkaisee yhden tai useamman säteen.
Turvallisuusluokituksen osalta valoverhot voidaan luokitella kahteen pääluokkaan: tyyppi 2 ja tyyppi 4. Ne ovat ulkoisesti samankaltaisia, mutta suunniteltu eri turvallisuustasoille. Tyyppi 4 valvoo suojattua tilaa, joka määrittelee yhteisen työtilan. Tyypin 2 valoverhot on suunniteltu alemman riskitason sovelluksiin.
Valoverhot suojaavat laitetta ympäröivää aluetta, ja niitä on saatavana useilla resoluutiotasoilla, kuten 14 millimetriä (mm) sormien tunnistukseen ja 24 mm käsien tunnistukseen. Banner Engineeringin malli SLC4P24-160P44 on tyypin 4 valoverhosarja, johon kuuluu lähetin- ja vastaanotinryhmä ja jonka resoluutio on 24 mm ihmisten ja koneiden, kuten cobottien, suojaamiseksi (kuva 4). Lähettimissä on rivi synkronoituja ja moduloituja infrapunavaloa lähettäviä diodeja. Vastaanottimissa on vastaava rivi synkronoituja valoilmaisimia. Lähettimien kantama on 2 metriä, ja nämä valoverhot voidaan asentaa 160–320 mm:n pituuksille 80 mm:n välein.
 Kuva 4: Tämän tyypin 4 valoverhon resoluutio on 24 mm. (Kuvan lähde: Banner Engineering)
Kuva 4: Tämän tyypin 4 valoverhon resoluutio on 24 mm. (Kuvan lähde: Banner Engineering)
Turvalaserskannerit ja valoverhot tarjoavat kosketuksettomia keinoja parantaa yhteisten työtilojen turvallisuutta. Niitä voi olla kuitenkin vaikea käyttää optisesti haastavissa ympäristöissä, kuten alueilla, joilla on voimakkaasti heijastavia pintoja, jotka voivat aiheuttaa ei-toivottuja valon interferenssejä. Ne voivat myös laueta vuotavan öljyn tai rasvan tai liiallisen pölyn tai kosteuden vuoksi.
Joidenkin optisten antureiden herkkyyttä voi säätää, mikä voi auttaa tietyntyyppisten interferenssien lieventämisessä. Nämä herkkyyssäädöt voivat myös pidentää vasteaikoja ja heikentää suorituskykyä muilla tavoin. Toinen ratkaisu on käyttää turvakontaktimattoa yhdessä optisten antureiden kanssa.
Turvakontaktimatot
Turvakontaktimatoissa on kaksi sähköä johtavaa levyä, jotka on erotettu toisistaan rasteroidulla eristekerroksella. Niitä voidaan käyttää yksinään tai yhdessä muiden anturityyppien kanssa. Jos henkilö astuu maton päälle, sähköä johtava ylälevy painuu alaspäin ja koskettaa alalevyä laukaisten hälytyssignaalin (kuva 5). Mattojen ulkopinta on liukastumista estävää ja vettä, likaa ja öljyä hylkivää polyuretaanimateriaalia. ASO Safety Solutionsin SENTIR-mattomalli 1602-5533 mahdollistaa jopa 10 maton kytkemisen sarjaan yhteen ainoan valvontayksikköön, jolloin saavutetaan jopa 10 m2:n peittoalue.
 Kuva 5: Kun turvamaton päälle astutaan, sen sähköä johtava ylä- ja alakerros koskettavat toisiaan, mikä laukaisee hälytyssignaalin. (Kuvan lähde: ASO Safety Solutions)
Kuva 5: Kun turvamaton päälle astutaan, sen sähköä johtava ylä- ja alakerros koskettavat toisiaan, mikä laukaisee hälytyssignaalin. (Kuvan lähde: ASO Safety Solutions)
Turvallisuus piilee yksityiskohdissa
Turvallisuuden takaamiseen ei ole olemassa yhtä ainutta kaavaa. Jokainen yhteistyösovellus on erilainen, ja ratkaisu tulee löytää kunkin sovelluksen uniikkien ominaisuuksien ja tarpeiden perusteella. Ratkaiseva tekijä on: missä kohtaa yhteistyön jatkumoa sovellus sijaitsee (katso kuva 1)? Mitä läheisempää cobotin ja ihmisten välinen vuorovaikutus on, sitä enemmän tarvitaan suojatoimenpiteitä.
Huomioon on otettava muitakin yksityiskohtia. Niihin kuuluvat muun muassa:
- Jokaisessa toimipisteessä on tehtävä yksityiskohtainen riskinarviointi sen selvittämiseksi, onko cobotti siirretty työpisteestä toiseen. Vaikka työpisteet vaikuttaisivat samanlaisilta, pienet poikkeamat voivat vaikuttaa turvallisuuteen.
- Jos yhteisessä työtilassa on muita koneita, täytyykö ne yhdistää cobotin pysäytysjärjestelmään tai turvahidastukseen?
- Tässä artikkelissa on keskitytty turvallisuuteen liittyviin laitteistoihin, mutta jatkuvasti yleistyvien verkottuneiden järjestelmien kyberturvallisuus on tärkeä näkökohta cobottien toimintaan tai turvajärjestelmiin kohdistuvien häiriöiden välttämiseksi.
Yhteenveto
Cobottien turvallisuus on kompleksinen aihe. Se alkaa yhteisen työtilan määrittelystä suojatussa ympäristössä ja edellyttää yhteistyötoiminnan riskinarviointia. Standardit kuten ISO/TS 15066 ja ISO 10218 -sarja ovat tärkeitä, ja ne tarjoavat suosituksia ja yleisohjeita. Cobotit sisältävät perusturvaominaisuuksia, kuten törmäysten tunnistusjärjestelmiä, voimatakaisinkytkennän, elastisia aktuaattoreita ja alhaisen inertian servomoottoreita. Yhteistyösovelluksen erityispiirteistä riippuen voidaan tarvita ylimääräisiä turvalaitteita, kuten läheisyysantureja, valoverhoja ja turvakontaktimattoja.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.