Kuinka turvalaserskannerit voivat suojata ihmisiä ja koneita
Julkaisija DigiKeyn kirjoittajat Pohjois-Amerikassa
2024-07-11
Turvalaserskannerit voivat edistää turvallisuutta teollisuus- ja logistiikkatiloissa. Ne voivat suojella ihmisiä vaarallisilta tilanteilta koneiden kanssa ja koneita ihmisten tahattomasti aiheuttamilta häiriöiltä.
Turvalaserskannereiden tehokkuuden maksimointiin sisältyy useita tekijöitä. Ensimmäinen näistä on selvittää, onko laserskanneri paras ratkaisu, vai sopiiko käyttökohteeseen paremmin jokin toinen tekniikka, kuten valoverho.
Kun on todettu, että skanneri on paras valinta, on tehtävä tärkeitä päätöksiä, kuten:
- optimaalisten suojakenttien ja kenttäjoukkojen valinta
- esimerkiksi kansainvälisen standardointijärjestön (ISO) standardin 13855 mukaisten turvatoimien toteuttaminen, joilla estetään henkilöiden lähestyminen
- oikean arvon valinta usean näytteen ottoa varten
- ominaisuuksiltaan optimaalisen skannerin valinta.
Tämän artikkelin alussa tarkastellaan tekijöitä, jotka vaikuttavat siihen, milloin on valittava skanneri ja milloin valoverho. Sen jälkeen esitellään skannereiden tärkeitä valintakriteereitä ja tarkastellaan seuraavien yritysten tarjoamia turvalaserskannereita: IDEC, Omron, SICK ja Banner Engineering.
Skanneri vai verho?
Yksi ensimmäisistä harkittavista asioista on suojeltavan fyysisen tilan määrittely. Sekä skannerit että valoverhot voivat suojata ihmisiä vahingoilta ja koneita häiriöiltä. Vaikka skannereiden ja valoverhojen suojaominaisuuksissa onkin jonkin verran päällekkäisyyttä, ne sopivat yleensä erilaisiin sovelluksiin, kuten:
Käyttöpisteen suojaus, joka viittaa koneen aktiiviseen alueeseen, jossa työ suoritetaan. Valoverhot sopivat hyvin tähän sovellukseen, koska ne voidaan sijoittaa optimaaliseen paikkaan, ja niiden resoluutio voidaan säätää havaitsemaan sormet, kädet tai jalat sekä tarjoamaan tarvittava suojaustaso. Skannerit tarvitsevat yleensä pidemmän vähimmäisetäisyyden vaaran paikasta pidemmän vasteaikansa vuoksi, eikä niitä yleensä käytetä käyttöpisteen suojaamiseen.
Kehävalvonta, joka suojaa konetta useilta puolilta. Käyttöpisteen suojauksen tavoin valoverhot soveltuvat hyvin kehävalvontaan tarjoten kompakteja ratkaisuja. Jos henkilö ylittää kehän, koneelle voidaan lähettää pysäytyssignaali. Vaikka sekä valoverhoja että skannereita voidaan käyttää kehävalvonnassa, turvavaloverhoja käytetään yleisemmin kehävalvonnassa ja skannereita aluevalvonnassa.
Kulunvalvonta ja aluevalvonta, jotka voidaan toteuttaa valoverhon tai skannerin avulla käyttökohteen erikoistarpeiden mukaan. Valoverhot ovat sopiva valinta silloin kun kohteeseen pääsee vain yhdestä kohdasta. Esimerkiksi kunkin valonsäteen yksittäinen seuranta ja arviointi sallii valoverhon tunnistaa ”pitkän” henkilön ja kynnyksen ylittävän kuormalavan kaltaisen ”matalan” materiaalialustan ja muuttaa reagointia vastaavasti.
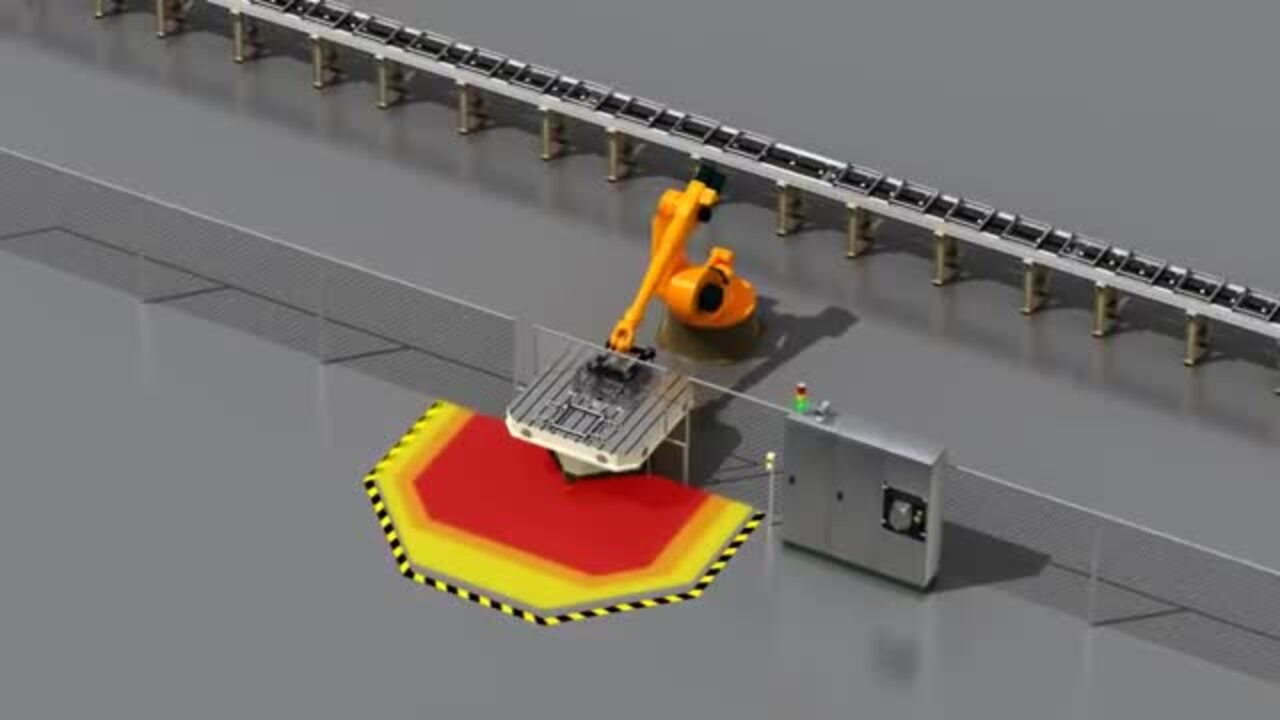
Skannerit voidaan asettaa valvomaan 275 asteen aluetta käyttäjän määrittämän kaksiulotteisen suojavyöhykkeen luomiseksi (kuva 1). Niillä voidaan muodostaa myös useita suojavyöhykkeitä henkilön ja suojatun koneen välisen etäisyyden perusteella ja hidastaa konetta tai pysäyttää sen tarpeen mukaan.
 Kuva 1: Tällainen turvalaserskanneri voi valvoa 275 asteen aluetta ja luoda kaksiulotteisen suojavyöhykkeen ja lähettää hälytyksen, jos alueelle tulee odottamaton henkilö tai esine (punaiset viivat). (Kuvan lähde: Banner Engineering)
Kuva 1: Tällainen turvalaserskanneri voi valvoa 275 asteen aluetta ja luoda kaksiulotteisen suojavyöhykkeen ja lähettää hälytyksen, jos alueelle tulee odottamaton henkilö tai esine (punaiset viivat). (Kuvan lähde: Banner Engineering)
Mobiilijärjestelmissä, kuten AMR-robotit (Autonomous Mobile Robot) ja AGV-automaattitrukit (Automatic Guided Vehicle), voi olla hyötyä useiden skannereiden käytöstä. Nämä skannerit voivat olla akkukäyttöisiä, ja ne voidaan asentaa toimimaan yhteistyössä ja valvomaan samanaikaisesti kymmeniä turvavyöhykkeitä ajoneuvon ympärillä. Eri vyöhykkeitä voidaan ottaa käyttöön ajoneuvon nopeuden, sijainnin ja ennakoitujen suunnanmuutosten perusteella. Skannereiden tietoja voidaan täydentää pyörissä olevilla koodereilla ja muilla anturisyötteillä, joilla tuetaan AMR-robotin navigointia.
Mikä turvallisuustaso halutaan?
Kun suojattava fyysinen tila on määritelty, seuraavaksi on huomioitava tarvittava turvallisuustaso. Paitsi että valoverhot ja turvalaserskannerit tarjoavat erilaisia etuja sovelluksille, ne tukevat erilaisia useissa kansainvälisissä standardeissa määriteltyjä turvallisuustasoja. Esimerkiksi ISO 13849-1 määrittelee turvallisten ohjaustoimintojen luotettavuuden käyttämällä suorituskykytasoja (PL) a:sta e:hen, jossa PLe edustaa korkeinta tasoa.
Turvalaserskannerit täyttävät PLd-kriteerit ja soveltuvat käytettäväksi sovelluksissa, joissa turvallisuus on ensisijainen tavoite. PLd-luokitus myönnetään järjestelmille, joissa vaarallisen toimintahäiriön todennäköisyys on kerran 1–10 miljoonassa tunnissa (141 – 1141 vuotta jatkuvaa toimintaa). Valoverhoja on saatavana laaja valikoima PLc–PLe-luokituksella.
IEC 62061, Koneturvallisuus: sähköisten, elektronisten ja ohjelmoitavien elektronisten ohjausjärjestelmien toiminnallinen turvallisuus on toinen tärkeä standardi. Se perustuu riskien arviointi- ja vähennysstrategiaan ja siinä käytetään sellaisia suojatoimintoja kuten valoverhoja ja turvalaserskannereita. Se sisältää toiminnallisten vaatimusten määrittelyn ja turvallisuustasovaatimukset (SIL).
Esimerkkejä toiminnallisista vaatimuksista ovat toimintataajuus, vasteaika, toimintatilat, käyttöjaksot, käyttöympäristö, vikaantumisvastetoiminnot jne. Tuloksena saatavat SIL-arvot mitataan asteikolla 1–4 (kuva 2).
 Kuva 2: Turvalaserskannerit täyttävät PLd- ja SIL3-kriteerit ja soveltuvat käytettäväksi käyttökohteissa, joissa turvallisuus on tärkeää. (Kuvan lähde: SICK.)
Kuva 2: Turvalaserskannerit täyttävät PLd- ja SIL3-kriteerit ja soveltuvat käytettäväksi käyttökohteissa, joissa turvallisuus on tärkeää. (Kuvan lähde: SICK.)
ISO 13855 määrittää, miten skannerit sijoitetaan sen mukaan, miten henkilö saattaa lähestyä kohdetta. Jos esimerkiksi skanneri on asennettu 300 mm:n korkeudelle, 70 mm:n resoluutio riittää ihmisen jalan havaitsemiseen. Jos asennuskorkeus on pienempi, suositeltu vähimmäisresoluutio on 50 mm.
Skannerin tekniset tiedot
Kun on varmistettu, että turvalaserskanneri täyttää käyttökohteen vaatimukset ja kykenee tarjoamaan tarvittavan turvallisuustason, on aika harkita sen teknisiä tietoja. Esimerkkejä tärkeistä skannerin teknisistä tiedoista ovat:
Skannauskulma. Saatavana on useita skannauskulmia, kuten 190°, 270° ja 275°. Skannerin skannauskulma ja rakenne määräävät, miten skanneri asennetaan järjestelmään valvomaan tarvittavia alueita.
Suojavyöhykkeet. Turvalaserskannereissa on useita suojavyöhykkeitä, mukaan lukien ensisijainen suojavyöhyke ja yksi tai useampi varoitusvyöhyke. Jotkin skannerit voivat käyttää skannaustietoja automaattiseen määritykseen ja jättää varoitusvyöhykkeellä paikallaan olevat esineet huomiotta (kuva 3). Joissakin tapauksissa turvalaserskanneri voi skannata useita vyöhykkeitä peräkkäin tai samanaikaisesti. Yksi skanneri voi esimerkiksi tukea jopa 70 erillistä turvavyöhykejoukkoa. AMR-robotissa skanneri voi tämän ominaisuuden avulla säätää skannausalueita ympäristön ja liikkumisnopeuden mukaan.
 Kuva 3: Käyttöönottoa voidaan nopeuttaa käyttämällä skanneria, joka käyttää skannattuja tietoja automaattiseen määritykseen tunnistaakseen varoitusvyöhykkeillä olevat liikkumattomat kohteet. (Kuvan lähde: IDEC.)
Kuva 3: Käyttöönottoa voidaan nopeuttaa käyttämällä skanneria, joka käyttää skannattuja tietoja automaattiseen määritykseen tunnistaakseen varoitusvyöhykkeillä olevat liikkumattomat kohteet. (Kuvan lähde: IDEC.)
Suojakentän etäisyys. Enimmäisetäisyys, jolle suojattu alue voi ulottua skannerista. Tyypilliset arvot ovat 3–10 m. Vaadittu suojakentän etäisyys riippuu paikallisista säännöksistä sekä skannerin vasteajasta ja resoluutiosta.
Resoluutio. Se mitataan millimetreinä ja määrittää pienimmän esineen, jonka skanneri pystyy tunnistamaan tarkasti. Tyypilliset arvot ovat 30–200 mm.
Vasteaika. Kutsutaan myös havaitsemisajaksi, ja se mittaa, kuinka nopeasti skanneri pystyy havaitsemaan lähestyvän kohteen. Tyypilliset arvot ovat 60–500 ms.
Näytteenotto. Ilmaisee, kuinka monta kertaa kohde on skannattava peräkkäin, jotta skanneri tunnistaa sen. Oletusarvoisesti tämä vaatii yleensä vähintään kaksi näytteenottoskannausta. Joissakin skannereissa ja joissakin olosuhteissa voidaan kuitenkin vaatia kymmenen peräkkäistä näytteenottoskannausta tai enemmän kohteen tunnistamiseksi.
Kaksoissuojausvyöhykkeet
Turvalaserskannereissa on erilaisia ominaisuuksia ja toimintoja, jotka sopivat erilaisiin käyttötarpeisiin. Esimerkiksi IDEC SE2L -turvalaserskannerit sisältävät master/slave-toiminnallisuuden ja kaksoissuojausvyöhykkeet. Master/slave-toiminnallisuuden avulla yksi skanneri voi viestiä jopa kolmen muun skannerin kanssa. Tämä voi yksinkertaistaa merkittävästi järjestelmän suunnittelua ja mahdollistaa edullisemman ohjaimen käytön, koska turvaohjaimen tarvitsee viestiä vain master-laitteen kanssa, joka välittää ohjeet slave-skannereille. Mallin SE2L-H05LP asennuksessa voidaan käyttää 2–20 m pitkiä kaapeleita, mikä entisestään lisää sen joustavuutta.
Näiden skannereiden skannausjakson pituus on 30 ms, ja niiden skannausalueella voi olla 32 kuviota. Kaksoisvyöhyketoiminnon avulla yksi SE2L-yksikkö voi itsenäisesti skannata kaksi vierekkäistä aluetta samanaikaisesti, mikä poistaa toisen skannerin tarpeen ja yksinkertaistaa järjestelmän suunnittelua.
Vähävirtainen toiminta mahdollistaa akkukäyttöisen turvallisuuden
AGV-ajoneuvojen ja AMR-robottien käyttöajan pidentäminen voi olla tärkeä näkökohta. Tällaisissa käyttökohteissa voidaan käyttää Omronin kompaktia (104,5 mm) OS32C-SP1-4M-turvalaserskanneria. Se kuluttaa enintään 5 W (3,75 W valmiustilassa) ja siinä on 70 turva- ja varoitusvyöhykeyhdistelmää, joten se sopii käytettäväksi kompleksisissa ympäristöissä (kuva 4). Muita ominaisuuksia ovat mm.:
- Vähimmäisresoluution arvoksi voidaan asettaa 30, 40, 50 tai 70 mm
- Turvavyöhyke riippuu resoluutiosta:
- 1,75 m (kun resoluutio on 30 mm)
- 2,5 m (kun resoluutio on 40 mm)
- 3,0 m (kun resoluutio on 50 mm)
- 4,0 m (kun resoluutio on 70 mm)
- Varoitusvyöhykkeen säde jopa 15 m
- Konfiguroitava vasteaika 80–680 ms.
- Vyöhykkeen vaihtoajaksi voidaan asettaa 20–320 ms
 Kuva 4: Tämä vähävirtainen turvalaserskanneri tukee 70 turvavyöhyke- ja varoitusvyöhykeyhdistelmää, joten se sopii kompleksisissa ja dynaamisissa ympäristöissä toimiviin AMR-robotteihin. (Kuvan lähde: Omron)
Kuva 4: Tämä vähävirtainen turvalaserskanneri tukee 70 turvavyöhyke- ja varoitusvyöhykeyhdistelmää, joten se sopii kompleksisissa ja dynaamisissa ympäristöissä toimiviin AMR-robotteihin. (Kuvan lähde: Omron)
Kolme kenttää valittavalla näytteenotolla ja resoluutiolla
SICK S300 Mini Standard -turvalaserskannereissa on valittavissa olevat havaintotarkkuudet ja näytteenottotasot. Esimerkiksi malli S32B-2011BA tukee resoluutioita 30, 40, 50 ja 70 mm. Kullekin kentälle voidaan määrittää useita näytteenotto- ja resoluutioarvoja, mukaan lukien samanaikaiset suojakentät (kuva 5). Nämä skannerit tukevat jopa 48 vapaasti määritettävää kenttää ja 16 vaihdettavaa kenttäjoukkoa. Kolmikenttätoiminnolla voidaan käyttää samanaikaisesti suojakenttää ja kahta varoituskenttää.
 Kuva 5: S300 Mini Standard -turvalaserskannereissa voidaan käyttää useita näytteenottotasoja ja eri resoluutioita kullekin skannattavalle kentälle. (Kuvan lähde: SICK.)
Kuva 5: S300 Mini Standard -turvalaserskannereissa voidaan käyttää useita näytteenottotasoja ja eri resoluutioita kullekin skannattavalle kentälle. (Kuvan lähde: SICK.)
Turva-PLC:n tarpeen eliminointi
Banner Engineeringin SX5-turvalaserskannereissa on kiinteä mykistystoiminto, joka voi valvoa ja reagoida signaaleihin ja ohittaa suojaustoiminnon automaattisesti, jotta kohde pääsee kulkemaan turvavyöhykkeen läpi aktivoimatta pysäytyskomentoa. Mykistystoiminto mahdollistaa koko turvavyöhykkeen ohittamisen (täydellisen mykistyksen) tai vain tietyn turvavyöhykkeen osan ohittamisen (osittainen dynaaminen mykistys).
SX5-pääyksikkö, kuten SX5-ME70, voi ohjata jopa kolmea SX5-R:n kaltaista etäyksikköä. Skanneri voi myös lukea inkrementaalisia kooderisyötteitä muuttaakseen turvavyöhykettä ajoneuvon nopeuden mukaan. Nämä toiminnot voivat poistaa turva-PLC:n kaltaisten lisäohjauslaitteiden tarpeen.
Yhteenveto
Oikein määritellyt, konfiguroidut ja integroidut turvalaserskannerit soveltuvat hyvin suojaamaan ihmisiä ja koneita esimerkiksi kulunvalvonnassa, aluesuojauksessa ja AGV-ajoneuvojen sekä AMR-robottien kaltaisissa mobiilijärjestelmissä. Ne täyttävät PLd- ja SIL3-vaatimukset ja sopivat käytettäväksi sovelluksissa, joissa turvallisuus on tärkeä näkökohta. Näitä skannereita on saatavilla erilaisilla ominaisuuksien ja toimintojen yhdistelmillä, jotka sopivat erilaisiin käyttötarpeisiin.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.