GaN-tehoasteiden integrointi tehokkaisiin akkutoimisiin BLDC-työntövoimajärjestelmiin
2023-02-22
Akkutoimisissa sovelluksissa, kuten yhteistyöroboteissa (ns. cobotit), sähköpolkupyörissä, teollisuusdroneissa ja sähkötyökaluissa tarvitaan kevyitä, tehokkaita ja pieniä sähkömoottoreita. Harjattomat DC-moottorit (Brushless Direct Current, BLDC) ovat tähän hyvä vaihtoehto, mutta moottorinohjauselektroniikkaan liittyy kompleksisia suunnittelutekijöitä. Suunnittelijan on säädettävä vääntömomenttia, nopeutta ja asentoa tarkasti samalla, kun varmistetaan hyvä tarkkuus sekä tärinän, melun ja sähkömagneettisen säteilyn (Electromagnetic Radiation, EMR) minimointi. Lisäksi suunnittelussa tulee välttää isokokoisia jäähdytyslevyjä ja ulkoisia johtosarjoja painon, tilantarpeen ja kustannusten laskemiseksi.
Kuten tavallista, suunnittelijoiden suurin haaste on tasapainottaa aikaa ja budjettia koskevat suunnitteluvaatimukset ja samalla välttää kalliit kehitysvirheet. Yksi tapa toteuttaa tämä on hyödyntää BLDC-moottoreiden vaatimiin tehoasteisiin nopeaa matalan häviön puolijohdetekniikkaa, kuten galliumnitridiä (GaN).
Tässä artikkelissa käsitellään GaN-pohjaisten tehoasteiden hyötyjä sekä EPC:n puolisiltatopologiaa hyödyntävää esimerkkilaitetta. Siinä selitetään, kuinka projektin voi aloittaa nopeasti vastaavilla kehityssarjoilla. Suunnittelijat oppivat samalla miten mitata BLDC-moottorin parametrit ja miten ohjata sitä ilman antureita FOC-ohjaustilassa (Field Orientation Control) minimaalisella ohjelmointityöllä käyttämällä Microchip Technologyn motorBench Development Suitea.
GaN-teknologian hyödyt
Jotta BLDC-moottoria voi ohjata tehokkaasti akkusovelluksissa, kehittäjät tarvitsevat tehokkaan, kevyen ja pienen ohjausasteen, jonka voi asentaa mahdollisimman lähelle toimilaitetta. Se voi olla esimerkiksi moottorikotelon sisällä.
Eristyshilaiset bipolaaritransistorit (Insulated-Gate Bipolar Transistor, IGBT) ovat kestäviä, ja niillä voi kytkeä jopa 100 megawatin (MW) virtoja 200 kilohertsin (kHz) taajuudella, mutta ne eivät sovi laitteisiin, joissa täytyy pyrkiä maksimoimaan jopa 80 voltin jännitettä käyttävän akun kesto. Korkea kosketinresistanssi, nolladiodi, kytkentähäviöt ja sammutuksen aikainen jälkivirta aiheuttavat signaalin vääristymistä, ylikuumenemista ja harhalähetteitä.
IGBT-transistoreihin verrattuna MOSFET (Metal Oxide Semiconductor Field-Effect Transistor) ‑transistoreiden kytkentä on nopeampaa ja niiden kytkentä- ja lämpöhäviöt ovat alhaisemmat, mutta niiden hilakapasitanssi vaatii tehokasta hilaohjainta ja korkeaa kytkentätaajuutta. Toimintakyky korkeilla taajuuksilla on tärkeää, sillä suunnittelijat voivat käyttää pienempiä elektroniikkakomponentteja kokonaistilantarpeen pienentämiseksi.
GaN-pohjaisten HEMT (High-Electron-Mobility Transistor) ‑transistorien korkea varauksenkuljettajien liikkuvuus mahdollistaa puolijohdeliitosten nopean kytkennän ja katkaisun. Integroidun GaN-ohjaimen, kuten EPC EPC23102ENGRT, ominaisuuksiin kuuluvat erityisen alhaiset kytkentähäviöt ja korkeat kytkentätaajuudet, mikä mahdollistaa kompaktien laitteiden suunnittelun mitä ahtaimpiin tiloihin. Tämä puolisiltatopologiaa käyttävä monoliittinen piiri sisältää syöttölogiikkarajapinnan, tasosiirtimet, käynnistystoiminnon ja hilaohjainpiirit, jotka ohjaavat GaN FET ‑lähtötransistoreja (kuva 1). Piirin kotelo on optimoitu parantamaan lämmön hajautumista ja laskemaan loisinduktanssia.
") Kuva 1: Puolisiltatopologiaa käyttävä EPC23102 sisältää ohjauslogiikan, tasosiirtimet, hilaohjaimet ja GaN FET ‑lähtötransistorit (vasemmalla). Piirin kotelo (oikealla) on optimoitu parantamaan lämmön hajautumista ja laskemaan loisinduktanssia. (Kuvan lähde: EPC)
Kuva 1: Puolisiltatopologiaa käyttävä EPC23102 sisältää ohjauslogiikan, tasosiirtimet, hilaohjaimet ja GaN FET ‑lähtötransistorit (vasemmalla). Piirin kotelo (oikealla) on optimoitu parantamaan lämmön hajautumista ja laskemaan loisinduktanssia. (Kuvan lähde: EPC)
Vähemmän hukkalämpöä ja alhaisempi EMR
EPC23102-lähtötransistorien tyypillinen nielun ja lähteen välinen johtamisresistanssi (RDS(on)) on 5,2 milliohmia (mΩ) (25 °C). Niiden jänniteluokitus on 100 volttia ja virtaluokitus 35. Lisäksi GaN-komponentin vaakasuuntainen rakenne ja runkodiodin puuttuminen mahdollistavat erittäin alhaisen hilavarauksen (QG) ja estosuuntaisen elpymisvarauksen (QRR).
GaN-ohjain mahdollistaa jopa viisi kertaa alhaisemmat kytkentähäviöt verrattuna MOSFET-komponenttiin vastaavalla RDS(on)-arvolla. Näin ollen GaN-pohjainen invertteri voi toimia jopa 3 megahertsin (MHz) pulssileveysmodulaatiolla (Pulse Width Modulation, PWM) ja lyhyemmällä jännitteettömällä ajalla (alle 50 nanosekuntia [ns]).
Loisinduktanssia vähentäviä koteloita käyttävien GaN-puolijohteiden korkeat kytkentänopeudet (dV/dt) ja matala lämpötilakerroin minimoivat signaalin vääristymisen sekä näin ollen myös EMR-häiriöt ja kytkentähäviöt. Tämä vähentää suodatusstrategioiden tarvetta, ja piirilevykortin tilaa voidaan säästää pienempien edullisten kondensaattoreiden ja induktiokelojen ansiosta.
Alhaisen kosketinresistanssin RDS(on) ohella GaN-komponenttien hyötyjä ovat muun muassa GaN-perusmateriaalin korkea lämmönjohtokyky ja komponenttikotelon suuri lämpökontaktipinta. Näiden ominaisuuksien ansiosta GaN-tehoasteet voivat kytkeä jopa 15 A:n virtoja ilman jäähdytyslevyä (kuva 2).
") Kuva 2: GaN-tehoasteen lämpenemisen ja vaihevirran suhde eri PWM-taajuuksilla, ympäristön lämpötila 25,5 °C. (Kuvan lähde: EPC)
Kuva 2: GaN-tehoasteen lämpenemisen ja vaihevirran suhde eri PWM-taajuuksilla, ympäristön lämpötila 25,5 °C. (Kuvan lähde: EPC)
EPC23102 sisältää myös robustit tasomuuntimet alapuolen kanavasta yläpuolen kanavaan. Nämä on suunniteltu toimimaan käytettäessä pehmeää tai kovaa kytkentää myös suurilla negatiivisen navan jännitteillä sekä ehkäisemään nopeista dV/dt-transienteista aiheutuvia virheaktivointeja, mukaan lukien ulkoisista lähteistä ja viereisistä vaiheista aiheutuvat transientit. Sisäisiin virtapiireihin sisältyvät logiikan sekä käynnistyksen jännitevaraus sekä ja poiskytkentä. Suojatoiminnot estävät FET-lähtötransistorien ei-toivotun aukeamisen ja vioittumisen liian alhaisilla syöttöjännitteillä.
Moottori-invertterin käyttövalmis arviointisarja
Nopein ja helpoin tapa aloittaa GaN-teknologian käyttö BLDC-kolmivaihemoottorin kanssa on käyttää EPC:n EPC9176KIT-arviointisarjaa moottori-invertterille. Se koostuu EPC9176-moottori-invertterikortista ja DSP-ohjainkortista. Mukana on myös yksinkertainen EPC9147E-ohjainsovitin siltä varalta jos asiakas haluaa ohjata laitetta omalla isäntäohjaimella. Liittimen kautta kulkevat seuraavat signaalit: 3 × PWM, 2 × enkooderi, 3 × Uvaihe, 3 × Ivaihe, UDC, IDC ja 2 × statusledi.
EPC9176-moottori-invertterikortti on referenssisuunnitelma, joka helpottaa asiakkaan omaa piirisuunnittelua. EPC9147A-ohjainkortti ja Microchip Technologyn motorBench-kehitysympäristö sen sijaan mahdollistavat kehityksen nopean aloittamisen ilman koodausta ja ohjelmointia.
Kolmivaiheinen BLDC-moottori-invertteri sisältää kolme GaN-pohjaista EPC23102-puolisiltaohjainta AC- tai DC-moottorien ja DC/DC-tehomuunninten ohjaamiseen. Kun RDS(on) on enintään 6,6 mΩ, tehoaste aiheuttaa hyvin vähän lämpöhukkaa jopa 28 A:n huippuvirralla (Ahuippu) tai jatkuvalla virralla 20 A rms (ARMS) jopa 100 voltin kytkentäjännitteillä. DC/DC-monivaihemuuntamiseen konfiguroitu EPC23102 tukee jopa 500 kHz:n PWM-kytkentätaajuutta ja moottorinohjaussovelluksissa jopa 250 kHz:n taajuutta.
EPC9176-moottori-invertterikortti on kooltaan vain 8,1 × 7,5 cm, ja se sisältää kaikki kriittiset toimintapiirit mitä kokonainen moottori-invertteri tarvitsee', mukaan lukien DC-väyläkondensaattorit, hilaohjaimet, reguloidut apujännitteet, vaihejännitteen, vaihevirran ja lämpötilan mittauksen, suojatoiminnot sekä haluttaessa ylivärähtely- tai EMR-suodattimet kullekin vaiheelle (kuva 3).
") Kuva 3: EPC9176-moottori-invertteri sisältää DC-väyläkondensaattorit, hilaohjaimet, jännitteensäätimen, jännitteen mittauksen, virta- ja lämpötilasuojaustoiminnot sekä EMR-suodattimet. (Kuvan lähde: EPC)
Kuva 3: EPC9176-moottori-invertteri sisältää DC-väyläkondensaattorit, hilaohjaimet, jännitteensäätimen, jännitteen mittauksen, virta- ja lämpötilasuojaustoiminnot sekä EMR-suodattimet. (Kuvan lähde: EPC)
GaN-kolmivaiheinvertteri toimii tulojännitteillä 14–65 VDC. Sen kytkentä toimii ilman ylityksiä, joten sen vääntömomentti on sulava ja käyntiääni minimaalinen. Kortti on optimoitu GaN-tekniikalle tyypillistä kytkentäjännitteen nousua varten (alle 10 V/ns), ja tätä voi valinnaisesti laskea käytettäessä DC/DC-muunninta. Lisäksi siihen on mahdollista kytkeä kaksi eri jännitetasoilla toimivaa roottoriasentoanturia (Hall-anturia).
Vääntömomentti ilman tärinää ja alhainen käyntiääni
BLDC-kolmivaihemoottorin esimerkkitoteutuksesta nähdään jännitteettömän ajan parametrisoinnin vaikutus moottorin käynnin sulavuuteen ja näin ollen melutasoon. GaN FET ‑transistoripohjaisen puolisillan yläpuolen ja alapuolen transistorien kytkentäsiirtymän lukitusajan voi määrittää hyvin lyhyeksi, koska GaN HEMT ‑transistorit reagoivat hyvin nopeasti eivätkä tuota loisylityksiä kuten hitaammat MOSFET-transistorit.
Kuvan 4 vasemmanpuoleinen kuvaaja esittää MOSFET-transistoreille tyypillisellä 500 ns:n jännitteettömällä ajalla ja 40 Khz:n PWM-taajuudella toimivaa GaN-invertteriä. Vaihevirran kuvaajan tulisi olla sulava sinimuoto, mutta siinä on merkittäviä vääristymiä, mikä aiheuttaa suuria värähtelyjä vääntömomentissa ja melua. Kuvan 4 oikeanpuoleisessa kuvaajassa jännitteetön aika on laskettu arvoon 50 ns, mistä seuraava sinimuotoinen vaihevirta saa moottorin toimivaan sulavasti ja paljon hiljaisemmin.
") Kuva 4: MOSFET-transistoreille tyypillisellä 500 ns:n jännitteettömällä ajalla 40 kHz:n PWM-taajuudella (vasemmalla) vaihevirtaan syntyy merkittäviä vääristymiä, jotka aiheuttavat suuria värähtelyjä vääntömomentissa ja melua. Kun jännitteetön aika on 50 ns (oikealla), saadaan aikaan sinimuotoinen vaihevirta, jolla moottori toimii sulavasti ja hiljaisemmin. (Kuvan lähde: EPC)
Kuva 4: MOSFET-transistoreille tyypillisellä 500 ns:n jännitteettömällä ajalla 40 kHz:n PWM-taajuudella (vasemmalla) vaihevirtaan syntyy merkittäviä vääristymiä, jotka aiheuttavat suuria värähtelyjä vääntömomentissa ja melua. Kun jännitteetön aika on 50 ns (oikealla), saadaan aikaan sinimuotoinen vaihevirta, jolla moottori toimii sulavasti ja hiljaisemmin. (Kuvan lähde: EPC)
Koska vaihevirran vääristymät ovat vähäisempiä, myös staattorikäämien magnetointihäviöt laskevat. Lisäksi vaihejännitteen pienemmät vääristymät mahdollistavat korkeamman resoluution sekä vääntömomentin ja nopeuden tarkemman ohjauksen erityisesti pienemmissä alhaisen induktanssin moottoreissa.
Enemmän tehoa vaativiin moottorinohjaussovelluksiin on saatavana kaksi GaN-invertterikorttia: EPC9167HCKIT (1 kW) ja EPC9167KIT (500 W). Molemmissa on käytössä GaN FET ‑transistori EPC2065, jonka RDS(on) on enintään 3,6 mΩ ja enimmäisjännite 80 volttia. EPC9167 käyttää yksittäisiä FET-transistoreita kullekin kytkentäasennolle, kun taas EPC9167HC käyttää kahta rinnakkain toimivaa FET-transistoria, jolloin lähtövirta on jopa 42 Ahuippu (30 ARMS). EPC2065 GaN FET ‑transistori tukee moottorinohjaussovelluksissa jopa 250 kHz:n PWM-kytkentätaajuutta ja DC/DC-muuntimissa jopa 500 kHz:n taajuutta.
EPC9173KIT-sarjan invertterikortti tukee vielä suurempaa tehoa: jopa 1,5 kW. Kortti muodostaa puolisiltahaarat kahdelle EPC23101ENGRT GaN ‑hilaohjainpiirille, joissa on vain yksi integroitu yläpuolen FET-tehotransistori. Tämän kortin voi laajentaa jännitteenalennus-, jännitteenkorotus-, puolisilta-, kokosilta- tai LLC-muuntimeksi. Sen lähtövirta on jopa 50 Ahuippu (35 ARMS), ja sitä voidaan käyttää riittävän jäähdytyksen kanssa jopa 250 kHz:n PWM-kytkentätaajuudella.
Ohjausaste toimimaan muutamassa minuutissa
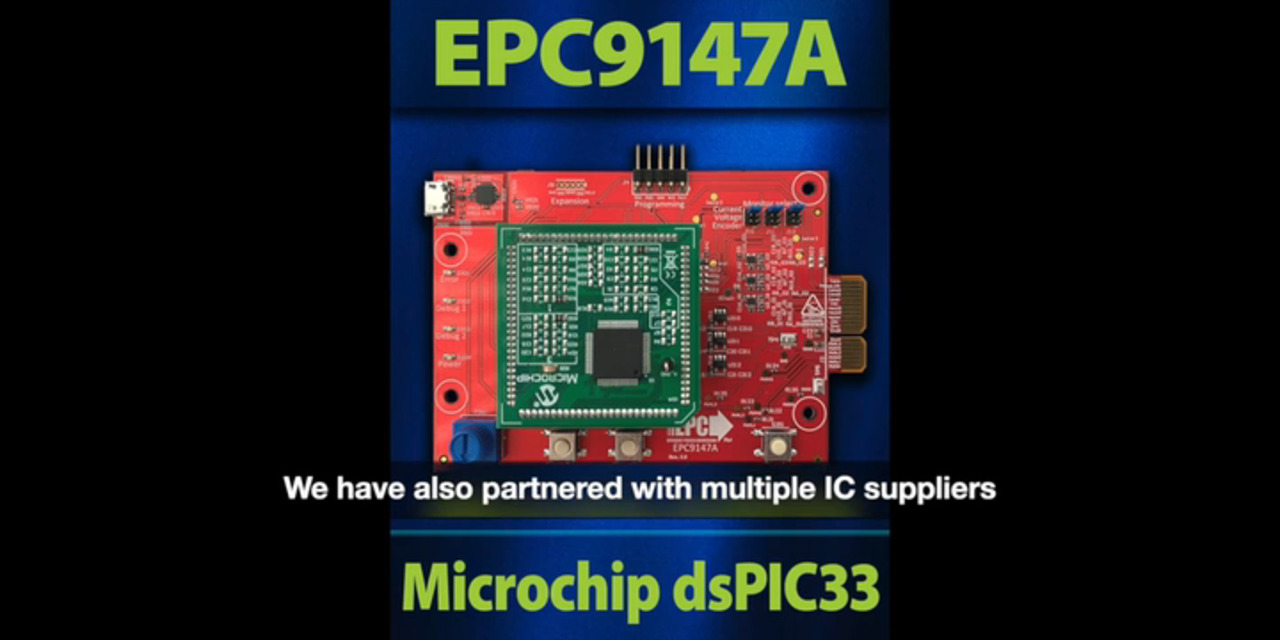
Nopein tapa arvioida EPC9176 GaN ‑invertterikorttia ilman koodausta on käyttää EPC9147A-ohjainrajapintakorttia. PIM-laajennusmoduuli (Plug-in Module) MA330031-2 sisältää Microchip Technologyn 16-bittisen DSP:n dsPIC33EP256MC506-I-PT (kuva 5).
") Kuva 5: Yleiskäyttöinen EPC9147A-ohjainrajapintakortti on yhteensopiva useiden PIM-laajennusmoduuleiden kanssa, kuten MA330031-2, joka perustuu 16-bittiseen DSP-piiriin dsPIC33EP256. (Kuvan lähde: EPC/Microchip Technology)
Kuva 5: Yleiskäyttöinen EPC9147A-ohjainrajapintakortti on yhteensopiva useiden PIM-laajennusmoduuleiden kanssa, kuten MA330031-2, joka perustuu 16-bittiseen DSP-piiriin dsPIC33EP256. (Kuvan lähde: EPC/Microchip Technology)
Suunnittelijat voivat käyttää DSP-ohjainrajapinnan tukena motorBench Development Suitea, johon tulee lisätä seuraavat:
- MPLAB X IDE_V5.45 ja suositeltu päivitys
- Code Configurator ‑laajennus (DSP-kohtainen käännös)
- motorBench-laajennus 2.35 (moottoriesimerkkejä)
Tässä esimerkissä käytetään EPC9146 GaN ‑moottori-invertterikorttia, joten:
- Aloita EPC914xKIT-sarjalle tarkoitetulla MCLV-2- tai EPC-projektilla nimeltä ”sample-mb-33ep256mc506-mclv2.X”
Käyttäjä voi yksinkertaisesti valita EPC9146 GaN -moottori-invertterikortille tarkoitetun hex-esimerkkitiedoston ja siirtää sen dsPIC33EP256MC506-DSP-piirille ohjelmointiadapterilla, kuten Microchip Technologyn 16-bittisille mikrokontrollereille tarkoitettu PG164100. Kytketty BLDC-moottori (Teknic_M-3411P-LN-08D) on sitten manuaalisesti ohjattavissa, ja se toimii FOC-tilassa ilman antureita.
Jos moottori ei käy tyydyttävällä tavalla tai se pitää konfiguroida eri toimintatilaan, motorBenchissä on saatavana myös konfiguroitava esimerkkitiedosto, joka tulee kääntää ennen sen siirtoa piirille. Yksi GaN-moottoriohjainten perustavanlaatuisista parametreista on aiemmin käsitelty alle 50 ns:n jännitteetön aika. Tämä tulee ehdottomasti tarkistaa ennen hex-tiedoston kääntämistä.
BLDC-moottorin mukautetut parametrit
Haluttaessa mukauttaa BLDC-moottorikonfiguraatio FOC-käyttöä varten, käyttäjät voivat mitata motorBench-kehitysympäristössä käytetyn moottorin parametrit ja syöttää vastaavat arvot konfigurointitiedostoon. Esimerkiksi ISL Products Internationalin MOT-I-81542-A-moottori voi toimia tässä testimoottorina. Se käyttää noin 361 wattia tehoa 24 voltilla ja pyörii 6100 kierrosta minuutissa (rpm).
Ensiksi on selvitettävä moottorin seuraavat neljä parametria:
- Tasavirtavastus: tämä mitataan staattorikäämien liitinten väliltä yleismittarilla.
- Induktanssi: tämä mitataan staattorikäämien liitinten väliltä yleismittarilla.
- Napaparit: napaparien määrittämiseksi suunnittelijan tulee oikosulkea kaksi vaihetta, jättää kolmas avoimeksi, kääntää akselia käsin, laskea kytkeytymisten määrä yhdellä kierroksella ja jakaa tulos kahdella.
- Vastasähkömotorinen voima (Back Electromotive Force, BEMF): tämä mitataan staattorikäämien liitinten väliltä oskilloskoopilla. Toimi seuraavalla tavalla:
- Kiinnitä mittapää kahteen vaihejohtimeen ja jätä kolmas auki.
- Käännä moottorin akselia käsin ja kirjaa jännitevaste.
- Mittaa suurimman sinipuoliaallon huippujen välinen jännite App ja jakso Tpuoli (kuva 6).
") Kuva 6: BEMF määritetään mittaamalla suurimman sinipuoliaallon huippujen välinen jännite App ja jakso Tpuoli. (Kuvan lähde: EPC)
Kuva 6: BEMF määritetään mittaamalla suurimman sinipuoliaallon huippujen välinen jännite App ja jakso Tpuoli. (Kuvan lähde: EPC)
Edellä esiteltyyn projektiesimerkkiin viitaten Microchip Technology määritti seuraavat parametrit Teknic M-3411P-LN-08D ‑moottorille (8,4 ARMS, kahdeksan napaa, vääntömomentti = 1 Nm ja 244 watin nimellisteho):
- App = 15,836 Vpp
- Tpuoli = 13,92 ms
- Napaparit: pp = 4
- Sitten Microchip Technology laski BEMF-vakion (1000 rpm = 1 krpm) yhtälöllä 1:
") Yhtälö 1
Yhtälö 1
 tälle esimerkkimoottorille
tälle esimerkkimoottorille
(motorBenchissä käytettiin arvoa 10,2)
- RL-L = 800 mΩ linjojen välinen vastus miinus 100 mΩ johtuen LCR-mittausjohtimista
- Ld = Lq = 1 mH tässä esimerkissä, vaikka mittaustulos olikin 932 mikrohenryä (µH)
Määritetyt parametrit syötetään motorBench-alivalikkoon Configure/PMSM Motor. Tätä varten suunnittelijat voivat käyttää samankaltaisen moottorityypin XML-konfigurointitiedostoa. Vaihtoehtoisesti parametrit voi syöttää uuteen (tyhjään) konfigurointitiedostoon, jonka voi tuoda Import Motor ‑painikkeella.
Yhteenveto
Pienet ja kevyet GaN-moottorinohjauspiirit mahdollistavat akkutoimisten BLDC-moottoreiden korkean tehokkuuden. Moottorikoteloon integroituna ne ovat hyvin suojattuja, yksinkertaistavat suunnittelua ja asennusta sekä vähentävät huoltotarvetta.
Referenssipiirien, valmiiksi ohjelmoitujen mallipohjaisten DSP-ohjainten ja moottorikehitysympäristön avulla BLDC-moottorisovellusten suunnittelijat ja ohjelmoijat voivat suunnitella piirejä nopeammin ja keskittyä enemmän sovelluskehitykseen.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.