Vähennä sähköajoneuvojen toimintamatkasta aiheutuvaa ahdistusta ja paranna turvallisuutta integroidulla FOC-moottorinohjauksella ja edistyneillä antureilla
Julkaisija DigiKeyn kirjoittajat Pohjois-Amerikassa
2022-01-05
Sähköajoneuvojen (EV) ja sähkökäyttöisten hybridiajoneuvojen (HEV) järjestelmien suunnittelijat pyrkivät jatkuvasti pidentämään yhdellä latauksella ajettavaa ajomatkaa toimintamatkasta aiheutuvan ahdistuksen vähentämiseksi ja ajoneuvon hiilijalanjäljen pienentämiseksi. Heidän täytyy samanaikaisesti kuitenkin lisätä järjestelmään uusia moottoreita, antureita, niihin liittyvää elektroniikkaa, prosessoreita ja ohjelmistoja, joilla lisätään ajoneuvon autonomiaa, parannetaan käyttäjän kokemia ominaisuuksia ja turvallisuutta sekä vähennetään kustannuksia.
Etenkin ovien, ikkunoiden, akkujen jäähdytyspuhallinten ja pumppujen sekä muiden laitteiden moottorit tuottavat päänvaivaa, sillä ne lisäävät ajoneuvon painoa. Lisäksi niiden ohjaukseen tarvitaan edistyneitä ohjausalgoritmeja, kuten vektoriohjausta eli kenttäsuuntautunutta ohjaustekniikkaa (FOC) melun ja virrankulutuksen minimoimiseksi – kuitenkin siten, että vaste pysyy tasaisena. Järjestelmän kokonaissuunnittelun haasteisiin kuuluvat lisäksi ISO 26262 ‑standardin toiminnalliseen turvallisuuteen liittyvät vaatimukset ja AEC-Q100-laatuvaatimukset.
Suunnittelijat voivat vastata näihin haasteisiin valitsemalla autoteollisuusautokäyttöön sopivia laitteita, jotka sisältävät enemmän laitteistoa ja ohjelmistoja ja sitä kautta yksinkertaistavat erilaisten toimintojen suunnittelua ja integrointia. Myös osien lukumäärä on pienempi, samoin kokonaisuuden koko.
Tässä artikkelissa käsitellään haasteita, joita EV- ja EHV-suunnittelijat kohtaavat. Sen jälkeen artikkelissa selostetaan, miten korkeasti integroitua BLDC (Brushless Direct Current) -moottorin FOC-ohjainta ja siihen liittyvää arviointialustaa voidaan hyödyntää tehokkaan EV/HEV-moottorin toteutuksessa. Lisäksi artikkelissa esitellään yhden valmistajan – Allegro MicroSystems – erilaisia antureita, joilla voidaan mitata virtaa, 3D-sijaintia, nopeutta ja suuntaa.
Kustannuksiin, turvallisuuteen ja toimintamatkasta aiheutuvaan ahdistukseen liittyvät ongelmat sähköajoneuvoissa
Erilaisten sähköajoneuvojen suunnittelijoiden täytyy ottaa huomioon lukuisia haasteita, kuten ajoneuvon hinta, turvallisuus ja luotettavuus (etenkin ajoneuvojen autonomian lisääntyessä), yhdellä latauksella saavutettava ajomatka (toimintamatkasta aiheutuva ahdistus) sekä akkujen käyttöikä.
Turvallisuuden ja luotettavuuden tarjoamiseen tarvitaan edistyneitä antureita, jotka täyttävät ISO 26262 ‑standardin kehittyneitä kuljettajan apujärjestelmiä (ADAS) koskevat vaatimukset. Suunnittelijat pyrkivät laskemaan kustannuksia ja pidentämään ajomatkaa käyttämällä yhä korkeampaa, jopa 800 voltin jännitetasoa, jolloin hyötysuhde paranee ja kaapelien paino pienenee. Suunnittelijat hyödyntävät myös akkutekniikassa tapahtunutta kehitystä.
Esimerkiksi akkujen lämmönhallinnan kehittyminen on pidentänyt ajomatkaa ja akkujen käyttöikää, ja EV- ja EHV-invertterien jäähdytyksen parantaminen auttaa kasvattamaan tehoa ja energiatiheyttä sekä vähentämään painoa.
Puolijohdelaitteiden aiempaa korkeampi integrointi mahdollistaa enemmän toimintoja pienemmällä painolla ja pienemmässä tilassa, mutta tarvittavien jäähdytyspuhallinten BLDC-moottoreita on ohjattava huolellisesti hyötysuhteen optimoimiseksi. Moottorinohjaimen hilaohjaimeen kannattaakin sisällyttää kehittyneitä moottorinohjausalgoritmeja, kuten FOC.
Tehokas jäähdytys
FOC varmistaa sähkömoottorien sujuvan toiminnan koko nopeusalueella ja tarjoaa täyden vääntömomentin heti käynnistyksestä alkaen. Lisäksi FOC pystyy kiihdyttämään ja hidastamaan moottoria nopeasti ja tasaisesti, mistä on hyötyä erittäin suorituskykyisten liikesovellusten tarkassa ohjauksessa. FOC:n avulla voidaan toteuttaa jopa 500 watin tehoisiin BLDC-moottoreihin sopivia erittäin tehokkaita, pienikokoisia ja hiljaisia pienjänniteohjaimia (LV) (enintään 50 volttia DC). Niitä käytetään tyypillisesti sähköajoneuvojen HV (High-Voltage) -akkujen jäähdytyspuhaltimissa, lämmityksen, ilmanvaihdon ja ilmastoinnin (LVI) puhaltimissa sekä HV-invertterien jäähdytysjärjestelmien nestepumpuissa (kuva 1).
") Kuva 1: FOC-moottorinohjaimissa voidaan käyttää LV-akkuja sähköajoneuvojen HV-akkujen ja HV-invertterien jäähdytykseen. (Kuvan lähde: Allegro MicroSystems)
Kuva 1: FOC-moottorinohjaimissa voidaan käyttää LV-akkuja sähköajoneuvojen HV-akkujen ja HV-invertterien jäähdytykseen. (Kuvan lähde: Allegro MicroSystems)
FOC toteutetaan perinteisissä ratkaisuissa mikrokontrollerilla ja ulkoisilla antureilla. Tällaiset niin sanotut suorat FOC-ratkaisut voivat olla monimutkaisia, ja niiden dynaaminen vaste on usein heikompi, koska niissä käytetään ulkoisia antureita moottorin toimintaparametrien mittaukseen.
Ulkoiset anturit eliminoimalla saavutetaan suorituskykyisempi ja edullisempi FOC-ratkaisu.
FOC:n toteutukseen tarvitaan kuitenkin puuttuvia antureita vastaava data, joka saadaan sähkömotorisen vastavoiman (BEMF) perusteella moottorikäämien napojen jännite- ja virtatiedoista. Vaikka laitteisto on yksinkertaisempi, anturittomaan FOC-ohjaukseen tarvittava ohjelmisto on monimutkaisempi.
Anturittomalla FOC-algoritmilla saavutetaan paras hyötysuhde ja dynaaminen vaste. Se on myös hiljainen. Lisäksi sen avulla voidaan toteuttaa robusti avoimen silmukan käynnistys moottorin ollessa pysähtyneenä, kun BEMF-dataa ei ole käytettävissä.
Helppo FOC-ratkaisu autojen jäähdytyspuhaltimille ja pumpuille
Useimmat FOC BLDC -ohjaimet vaativat, että ohjelmistokehittäjän on kirjoitettava ja portattava algoritmi mikroprosessorille tai mikrokontrollerille. Allegro MicroSystems A89307KETSR-J integroi anturittoman FOC-algoritmin suoraan hilaohjaimeen. A89307KETSR-J vaatii vain viisi ulkoista passiivista komponenttia (neljä kondensaattoria ja yksi vastus), minkä ansiosta osaluettelo on lyhyempi, luotettavuus paranee ja rakenne on yksinkertaisempi (kuva 2).
") Kuva 2: Tyypillinen A89307KETSR-J-piirillä toteutettu xEV-akuston jäähdytyspuhaltimen ohjauspiiri ja sen viisi ulkoista komponenttia: neljä kondensaattoria ja yksi vastus. (Kuvan lähde: Allegro MicroSystems)
Kuva 2: Tyypillinen A89307KETSR-J-piirillä toteutettu xEV-akuston jäähdytyspuhaltimen ohjauspiiri ja sen viisi ulkoista komponenttia: neljä kondensaattoria ja yksi vastus. (Kuvan lähde: Allegro MicroSystems)
A89307KETSR-J-hilaohjaimen käyttöjännite on 5,5–50 volttia DC. Integroitu FOC-algoritmi sisältää vakiovääntömomentin ja vakiotehon sekä avoimen silmukan ja vakionopeuden käyttötilat. A89307KETSR-J sisältää pulssinleveysmodulaation (PWM) tai kellotilan nopeussäädön, jarrutuksen ja suunnan tulot sekä vikatilanteiden ja moottorin nopeuden lähdöt (kuva 3).
") Kuva 3: A89307KETSR-J-piirin sisäisessä lohkokaaviossa on esitetty FOC-ohjain (keskellä), PWM- tai kellotilan nopeussäädön (SPD), jarrun (BRAKE) ja suunnan (DIR) tulot (vasemmalla), sekä vian (FAULT) ja moottorin nopeuden (FG) lähdöt (samoin vasemmalla). (Kuva: Allegro MicroSystems)
Kuva 3: A89307KETSR-J-piirin sisäisessä lohkokaaviossa on esitetty FOC-ohjain (keskellä), PWM- tai kellotilan nopeussäädön (SPD), jarrun (BRAKE) ja suunnan (DIR) tulot (vasemmalla), sekä vian (FAULT) ja moottorin nopeuden (FG) lähdöt (samoin vasemmalla). (Kuva: Allegro MicroSystems)
A89307KETSR-J on optimoitu ulkoisten pienen johtamisresistanssin N-kanavan MOSFET-tehotransistorien ohjaukseen. Se pystyy tarjoamaan MOSFET-transistorien nopeaan kytkemiseen tarvittavat suuret huippuohjausvirrat, jolloin kytkemisen tehohäviö jää mahdollisimman pieneksi, toiminnan hyötysuhde paranee ja lämmönhallintaongelmia esiintyy vähemmän. Käytettävissä on useita hilaohjaintasoja, joten suunnittelijat voivat optimoida sähkömagneettisten häiriöiden (EMI) ja hyötysuhteen keskinäisen tasapainon haluamallaan tavalla. MOSFET-transistorien nopea kytkeminen päälle vähentää kytkentähäviöitä, mutta lisää EMI-häiriöitä, kun taas MOSFET-transistorien kytkeminen hitaammin vähentää EMI-päästöjä, mutta kasvattaa kytkentähäviöitä ja heikentää hyötysuhdetta.
Moottorin nopeutta voidaan ohjata PWM-, analogia- tai CLOCK-tulon kautta. Myös nopeuden ohjaaminen suljetulla silmukalla on mahdollista ohjelmoimalla laitteeseen kierrosnopeuden (RPM) ja kellotaajuuden välinen suhde. Anturittomaan käynnistyksen ohjaukseen kuuluu eteen- ja taaksepäin suuntautuvan esipyörimisen (tuulimylly) tunnistus ja synkronointi, joten A89307KETSR-J pystyy toimimaan laajalla moottori- ja kuormitusalueella.
Myös Allegro MicroSystemsin käynnistysalgoritmi, johon ei liity käänteistä käyntisuuntaa, parantaa käynnistysvaiheen suorituskykyä. Moottori käynnistyy heti käynnistyksen jälkeen oikeaan pyörimissuuntaan ilman vastakkaissuuntaista tärinää tai värinää. Soft-On-Soft-Off-toiminto kasvattaa käynnistyskäskyn jälkeen moottoriin syötettävää virtaa asteittain (tuulimyllytila) ja vähentää pysäytyskäskyn jälkeen moottorista tulevaa virtaa asteittain, mikä tekee siitä entistä hiljaisemman (kuva 4).
 Kuva 4: A89307KETSR-J-piirin virran aaltomuodot: pehmeä käynnistys (yllä) ja pehmeä sammutus (alla) tekevät moottorin toiminnasta tasaista ja hiljaista. (Kuvan lähde: Allegro MicroSystems)
Kuva 4: A89307KETSR-J-piirin virran aaltomuodot: pehmeä käynnistys (yllä) ja pehmeä sammutus (alla) tekevät moottorin toiminnasta tasaista ja hiljaista. (Kuvan lähde: Allegro MicroSystems)
A89307KETSR-J tarjoaa I2C-rajapinnan, jonka kautta voidaan määrittää moottorin nimellisvirta, jännite, nopeus, vastus ja käynnistysprofiili. Lisäksi I2C huolehtii käynnistyksestä/sammutuksesta ja nopeuden säätämisestä sekä nopeuden takaisinkytkentä- ja vikasignaaleista.
Anturittoman FOC:n arviointialusta
Suunnittelijat voivat APEK89307KET-01-T-DK-arviointialustan ja siihen liittyvän ohjelmiston avulla nopeuttaa FOC-pohjaisten A89307KETSR-J-piiriä käyttävien BLDC-moottoriohjainten kehittämistä (kuva 5). Kortti sisältää A89307KETSR-J-piirin ja tarjoaa käyttöön kaikki sen tulo- ja lähtönastat. Lisäksi se sisältää täydellisen kolmivaiheisen tehoasteen BLDC-moottorin ohjaamiseksi. Suunnittelijat voivat valita FOC-käyttöparametrit yksinkertaisella graafisella käyttöliittymällä (GUI) ja ladata ne sirun EEPROM-muistiin. Koska A89307KETSR-J tarvitsee vain vähän muita komponentteja, sen avulla voidaan toteuttaa moottorin kotelon sisälle mahtuvia ohjaimia, jolloin ratkaisu vie vieläkin vähemmän tilaa.
 Kuva 5: APEK89307KET-01-T-DK ‑arviointialusta sisältää A89307KETSR-J-piirin (U1, keskellä alustan vasemmalla puolella) ja kuusi MOSFET-tehotransistoria (oikealla) BLDC-moottorin ohjaukseen. (Kuvan lähde: Allegro MicroSystems)
Kuva 5: APEK89307KET-01-T-DK ‑arviointialusta sisältää A89307KETSR-J-piirin (U1, keskellä alustan vasemmalla puolella) ja kuusi MOSFET-tehotransistoria (oikealla) BLDC-moottorin ohjaukseen. (Kuvan lähde: Allegro MicroSystems)
ADAS-järjestelmän anturit
xEV-järjestelmien suunnittelijoiden täytyy saada tietoa moottoriohjainten, DC-DC-muunninten ja invertterien virtatasoista sekä kuristusventtiilien ja sylinterien pyörähdysasennosta sekä vaihteiston vaihteiden nopeudesta ja suunnasta kompaktien ja tehokkaiden ADAS-toimintojen toteuttamiseksi. Allegro MicroSystems tarjoaa muun muassa seuraavia ADAS-anturiratkaisuja:
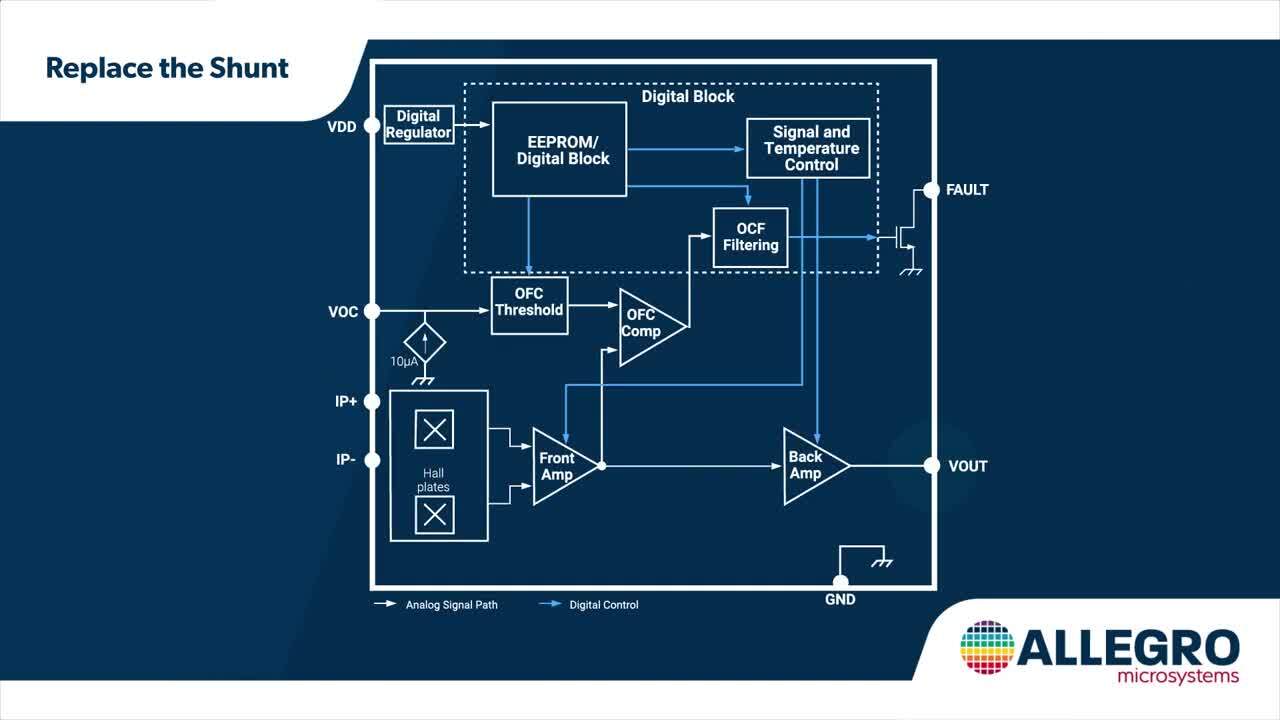
Virranmittaus: ACS72981KLRATR-150B3 mittaa AC- tai DC-virran taloudellisesti ja tarkasti. Tämän erittäin tarkan lineaarisen Hallin ilmiöön perustuvan virta-anturin kaistanleveys on 250 kilohertsiä (kHz). Se on tarkoitettu käytettäväksi moottoriohjauksessa, DC-DC-muuntimen ohjauksessa, invertterin ohjauksessa ja kuorman mittauksessa sekä hallinnassa. Tämän AEC-Q100-hyväksytyn mikropiirin vasteaika on < 2 mikrosekuntia (µs), ja se tukee turvakriittisten sovellusten nopeaa ylivirran tunnistusta.
3D-asentomittaus: Kontaktiton lineaarinen ja pyörivä magneettinen 3D-asentomittari kaasuläpän, venttiilin, sylinterin ja vaihteiston asennon mittaukseen voidaan toteuttaa nopeasti Allegro MicroSystemsin A31315LOLATR-XY-S-SE-10 3DMAG -mikropiirillä. Se pystyy mittaamaan sekä vaaka- että pystysuoraa pyörimisliikettä ja lisäksi lineaarista liikettä sivulta toiselle sekä edestakaista liikettä (kuva 6).
 Kuva 6: A31315LOLATR-XY-S-SE-10 3D-asentoanturi pystyy mittaamaan sekä vaaka- että pystysuoraa pyörimisliikettä ja lisäksi lineaarista liikettä sivulta toiselle sekä edestakaisin. (Kuvan lähde: Allegro MicroSystems)
Kuva 6: A31315LOLATR-XY-S-SE-10 3D-asentoanturi pystyy mittaamaan sekä vaaka- että pystysuoraa pyörimisliikettä ja lisäksi lineaarista liikettä sivulta toiselle sekä edestakaisin. (Kuvan lähde: Allegro MicroSystems)
A31315LOLATR-XY-S-SE-10-anturin lähdön muodoksi voidaan valita ratiometrinen analoginen, PWM tai SAE J2716 SENT-lähetys. Se on kehitetty vastaamaan ISO 26262 ASIL B- (yksi siru SOIC-8-kotelossa) ja ASIL D (redundantti kaksoissiru TSSOP-14-kotelossa) -vaatimuksiin turvallisuuteen liittyvissä autoteollisuuden järjestelmissä.
Nopeus ja suunta: ATS19520LSNBTN-RSWHPYU on tärinäsietoinen, differentiaalinen Hallin ilmiöön perustuva vaihteiston nopeutta ja suuntaa mittaava hammaspyörän hammasanturi. Saatavana on eteenpäin ja taaksepäin pyörimisen mittaukseen sopivat vaihtoehdot (kuva 7).
 Kuva 7: Kuvassa esitetty ATS19520-piirin F-versio mittaa pyörimistä eteenpäin, kun hammaspyörän hammas kulkee nastalta 1 nastalle 3 (yllä), ja pyörimistä taaksepäin, kun hammaspyörän hammas kulkee nastalta 3 nastalle 1 (alla). R-versio mittaa pyörimistä vastakkaisiin suuntiin. (Kuvan lähde: Allegro MicroSystems)
Kuva 7: Kuvassa esitetty ATS19520-piirin F-versio mittaa pyörimistä eteenpäin, kun hammaspyörän hammas kulkee nastalta 1 nastalle 3 (yllä), ja pyörimistä taaksepäin, kun hammaspyörän hammas kulkee nastalta 3 nastalle 1 (alla). R-versio mittaa pyörimistä vastakkaisiin suuntiin. (Kuvan lähde: Allegro MicroSystems)
ISO 26262 ASIL B-hyväksytyssä anturissa on integroitu diagnostiikka, ja se soveltuu käytettäväksi xEV-voimansiirroissa. Kolminastainen SIP-kotelo (Single-In-Line) sisältää integroidun takabiasoidun magneetin, jolla mitataan pyörivien rautapohjaisten kohteiden nopeutta ja suuntaa, sekä sähkömagneettisen yhteensopivuuden varmistamiseksi integroidun kondensaattorin.
Yhteenveto
Integroidut anturittomat BLDC-moottorien FOC-ohjaimet ja virta-anturit, magneettiset asentoanturit ja pyörimisanturit ovat tärkeä osa tehokkaiden ja turvallisten xEV-ajoneuvojen suunnittelua sekä ajomatkojen pidentämistä ja hiilijalanjälkien pienentämistä. FOC-moottoriohjaimia käyttämällä voidaan suunnitella etenkin tehokkaampia ja hiljaisempia akustojen ja invertterien jäähdytysjärjestelmiä, jotka tarjoavat kehittyneen dynaamisen vasteen. Kompaktit, tarkat ja energiatehokkaat anturit auttavat osaltaan kehittämään xEV-ajoneuvoja, jotka täyttävät kehittyneiden kuljettajan apujärjestelmien (ADAS) luotettavuusvaatimukset ja ISO 26262 ‑standardin toiminnallista turvallisuutta koskevat vaatimukset.
Suositeltavaa luettavaa
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.