Useita satelliittijärjestelmiä käyttävien GNSS-moduulien nopea käyttöönotto paikannusta varten
Julkaisija DigiKeyn kirjoittajat Pohjois-Amerikassa
2021-09-09
Paikannuspohjaisten toimintojen käyttö hyödyntämällä useita satelliittijärjestelmiä käyttäviä GNSS (Global Navigation Satellite System) -vastaanottimia Euroopan Galileo-, Yhdysvaltojen GPS- (Global Positioning System), Venäjän GLONASS-, Kiinan BeiDou Navigation Satellite System- ja Japanin QZSS-järjestelmissä on lisääntymässä useissa sovelluksissa, kuten robotiikassa, autonomisissa ajoneuvoissa, teollisuusautomaatiossa, logistiikassa ja omaisuudenseurannassa, lennokeissa sekä maatalouskoneissa ja raskaissa rakennuskoneissa. Useita satelliittijärjestelmiä käyttävien GNSS-vastaanottimien käyttö tarjoaa muun muassa seuraavia etuja: paikannus-, navigointi- ja ajoitussignaalien (PNT) parempi saatavuus, suurempi tarkkuus ja luotettavuus sekä robustimmat sovellukset.
Useita satelliittijärjestelmiä käyttävien vastaanottimien kehittäminen on kuitenkin monimutkaista ja vie paljon aikaa. Siihen sisältyy: L-kaista-antennin optimointi, radiotaajuus (RF) -etuasteen suunnittelu, signaalinkäsittelyalgoritmien integrointi eri PNT-signaalien saamiseksi, seuraamiseksi ja käyttämiseksi kantataajuudella, sovellusohjelmiston koodaus PNT-datan poimimiseksi jokaisesta kantataajuuskanavasta sekä tietojen käyttäminen järjestelmätoimintojen toteuttamiseksi. Suunnittelijoiden on myös valittava sopiva antenni ja sijoitettava se oikein.
Vaihtoehtoisesti suunnittelijat voivat käyttää valmiita GNSS-moduuleja ja kehitysympäristöjä, joilla paikannustoiminnot voidaan integroida järjestelmään nopeasti ja tehokkaasti. Näihin GNSS-moduuleihin sisältyvät RF-etuaste, kantataajuinen prosessointi ja sulautettu laiteohjelmisto. Tämä nopeuttaa sovellusohjelmistojen kehittämistä. Jotkin GNSS-moduulit sisältävät myös antennit.
Tässä artikkelissa tarkastellaan GNSS:n ja PNT:n perusteita sekä useita satelliittijärjestelmiä käyttävien GNSS-vastaanottimien toimintaa. Sen jälkeen siinä käsitellään etuja ja haittoja, jotka liittyvät antennien integrointiin GNSS-moduuleihin. Sitten artikkelissa esitellään useita GNSS-moduuleja – integroitujen antennien kanssa ja ilman – sekä niihin liittyviä STMicroelectronicsin, Septentrion ja Würth Elektronikin evaluointikortteja, joita suunnittelijat voivat käyttää tarkkojen ja robustien paikannuspohjaisten sovellusten tehokkaaseen ja kustannustehokkaaseen kehittämiseen.
Mitä ovat GNSS ja PNT?
GNSS ja PNT ovat läheisesti toisiinsa liittyviä käsitteitä. GNSS-satelliitit ovat kaikkein yleisin PNT-signaalien lähde. GNSS-satelliitit ovat pohjimmiltaan erittäin tarkkoja synkronoituja kelloja, jotka lähettävät jatkuvasti PNT-informaatiota. GNSS-moduuli vastaanottaa tietyn satelliitin PNT-signaaleja sekä laskee moduulin ja kyseisen satelliitin välisen etäisyyden. Kun vastaanotin tietää etäisyyden vähintään neljään satelliittiin, se voi arvioida oman sijaintinsa. On kuitenkin useita sijainnin arviointitarkkuutta heikentäviä virhelähteitä, kuten:
- Kellon ryömintä GNSS-satelliittien ajastuspiireissä
- Epätarkkuudet GNSS-satelliittien tarkan kiertoratasijainnin ennustamisessa
- Satelliittilaitteiden yleinen suorituskykypoikkeama suhteessa muihin satelliitteihin, mitä kutsutaan myös satelliittien bias-virheiksi
- Vääristymät ja viiveet signaalin lähetyksessä sen kulkiessa ionosfäärin ja troposfäärin läpi
- Monitieheijastus ja suorituskykyvaihtelut sekä ryömintä vastaanottimessa.
Suunnittelijoilla on käytettävissä erilaisia tekniikoita satelliittipohjaisten ja ilmakehän aiheuttamien GNSS-virheiden korjaamiseen.
GNSS-suorituskyvyn parantaminen
Paras tapa minimoida GNSS-vastaanottimen aiheuttamien virheiden vaikutus on käyttää kaikkein suorituskykyisintä vastaanotinta, joka sopii kyseisen sovelluksen kustannus- ja kokorajoituksiin. Mutta eivät edes huipputehokkaat vastaanottimet ole täydellisiä, vaan niiden suorituskykyä voidaan hyvin todennäköisesti parantaa. On tärkeää ymmärtää näitä korjausmenetelmiä, koska niiden tehokkuus vaihtelee, eivätkä jotkin GNSS-moduulit pysty toteuttamaan kaikkia niistä.
Useat GNSS-korjausmenetelmät käyttävät maanpäällisiä referenssiasemia (kuva 1). Kaikkein vakiintuneimpia menetelmiä suorittaa vastaanottimissa GNSS-korjauksia käyttäen maanpäällisiä referenssiasemia ovat RTK (Real-Time Kinematic) ja PPP (Precise Point Positioning). Viime aikoina saataville on tullut myös RTK-PPP-hybridimenetelmiä.
 Kuva 1: GNSS-käyttäjävastaanotin voi saada referenssiverkon kautta tietoa ilmakehän, kellon ja kiertoradan virheistä paikannustarkkuuden parantamiseksi. (Kuvan lähde: Septentrio)
Kuva 1: GNSS-käyttäjävastaanotin voi saada referenssiverkon kautta tietoa ilmakehän, kellon ja kiertoradan virheistä paikannustarkkuuden parantamiseksi. (Kuvan lähde: Septentrio)
RTK nojaa yksittäisen tukiaseman tai paikallisen referenssiverkon korjaustietoihin. Näiden avulla se voi poistaa suurimman osan GNSS-virheistä. RTK edellyttää, että tukiasema ja vastaanotin sijaitsevat lähellä toisiaan, enintään 40 kilometrin (km) päässä toisistaan, jotta niissä ilmenevät virheet olisivat samoja. Post-Processed Kinematic eli PPK on muunnelma RTK:sta. Sitä käytetään laajalti maanmittauksessa ja kartoituksessa erittäin tarkkojen paikannustietojen ja senttimetritason tarkkuuden saavuttamiseen.
PPP-korjauksiin käytetään vain kiertoradan ja satelliittikellon virheitä. Nämä satelliittikohtaiset virheet eivät riipu käyttäjän sijainnista. Tämä vähentää tarvittavien referenssiasemien määrää. PPP ei kuitenkaan ota huomioon ilmakehään liittyviä virheitä, joten sen tarkkuus on heikompi kuin RTK:n. Lisäksi PPP-korjausten alustusaika voi olla noin 20 minuuttia. Pidempi alustusaika ja heikompi tarkkuus tekevät PPP:stä epäkäytännöllisen moniin sovelluksiin.
Sovelluksissa, joissa tarvitaan lähes RTK-tarkkuutta ja nopeita alustusaikoja, käytetään usein uusinta GNSS-korjauspalvelua RTK-PPP (jota kutsutaan joskus nimellä SSR (State-Space Representation)). Se käyttää referenssiverkkoa, jossa asemat sijaitsevat noin 100 kilometrin (65 mailin) etäisyydellä toisistaan ja joka kerää GNSS-dataa ja laskee joukon satelliitti- ja ilmakehäkorjauksia. Referenssiverkko lähettää korjaustiedot tilaajille internet-, satelliitti- tai matkapuhelinverkkojen kautta. RTK-PPP-palvelua käyttävät GNSS-vastaanottimet voivat saavuttaa alle desimetrin tarkkuuden. RTK-, PPP- ja RTK-PPP-korjausmenetelmien valintaan sisältyy useita suunnitteluun liittyviä kompromisseja. Kehittäjien on arvioitava nämä valitakseen optimaalisen ratkaisun kutakin sovellusprofiilia varten. (Kuva 2).
 Kuva 2: Kolmen yleisen GNSS-korjausmenetelmän vahvuudet ja heikkoudet. (Kuvan lähde: Septentrio)
Kuva 2: Kolmen yleisen GNSS-korjausmenetelmän vahvuudet ja heikkoudet. (Kuvan lähde: Septentrio)
Satelliittipohjaisia parannusjärjestelmiä (SBAS, Satellite-based Augmentation System) alkaa olla saatavilla alueellisesti korvaamaan maanpäällisiä RTK-, PPP- ja RTK-PPP-korjausmenetelmiä. SBAS-järjestelmässä käytetään edelleen maa-asemia GNSS-virheiden mittaamiseen, mutta asemat jakautuvat ympäri maanosia. Mitatut virheet prosessoidaan keskuspaikassa, jossa korjaukset lasketaan ja lähetetään geosynkronisiin satelliitteihin halutulla alueella. Satelliitit lähettävät korjaustiedot alkuperäisen GNSS-datan päällä tai sen lisänä.
GNSS-tarkkuus riippuu satelliittimittausten ja niihin liittyvien korjausten saatavuudesta ja tarkkuudesta. Huipputehokkaat GNSS-vastaanottimet seuraavat GNSS-signaaleja monilla taajuuksilla ja käyttävät useita GNSS-satelliittijärjestelmiä ja erilaisia korjausmenetelmiä tarvittavan tarkkuuden ja häiriönsietokyvyn saavuttamiseksi. Tästä johtuva redundanssi mahdollistaa vakaan suorituskyvyn, vaikka joissakin satelliittimittauksissa ja -datassa esiintyisikin häiriöitä. Suunnittelijat voivat valita erilaisten GNSS-tarkkuus- ja redundanssiominaisuuksien väliltä (kuva 3).
 Kuva 3: GNSS-tarkkuusluokat ja vastaavat korjausmenetelmät sekä sovellusesimerkkejä. (Kuvan lähde: Septentrio)
Kuva 3: GNSS-tarkkuusluokat ja vastaavat korjausmenetelmät sekä sovellusesimerkkejä. (Kuvan lähde: Septentrio)
GNSS-moduulit: integroidut ja ulkoiset antennit
Useita satelliittijärjestelmiä käyttävän paikannuksen kompleksisuuden vuoksi useilta toimittajilta on saatavilla moduuleja, jotka nopeuttavat markkinoilletuontiaikaa, laskevat kustannuksia ja takaavat suorituskyvyn. Suunnittelijoiden on kuitenkin punnittava, käytetäänkö tuotteessa GNSS-moduulin sisäistä antennia vai valitaanko sen sijaan GNSS-moduulin ulkopuolella sijaitseva antenni. Sovelluksissa, joissa markkinoilletuontiaika ja kustannukset ovat etusijalla, integroitu antenni voi olla parempi vaihtoehto, koska se vaatii huomattavasti vähemmän teknistä suunnittelua. FCC- tai CE-sertifiointia vaativissa sovelluksissa integroidulla antennilla varustetun moduulin käyttö voi myös nopeuttaa hyväksyntäprosessia. Ratkaisun koko voi kuitenkin kasvaa ja joustavuus voi olla integroiduissa antenniratkaisuissa rajallista.
Ulkoiset antennit tarjoavat suunnittelijoille laajemman valikoiman suorituskyky- ja asetteluvaihtoehtoja. Tuotteeseen voidaan valita suuri ja erittäin suorituskykyinen antenni tai pienempi ja suorituskyvyltään heikompi antenni. Lisäksi antenni voidaan sijoittaa joustavammin suhteessa GNSS-moduulin sijaintiin. Tämä lisää joustavuutta suunnitteluun. Sijoittelun joustavuus mahdollistaa myös ulkoisen antennin, mikä tarjoaa luotettavamman GNSS-toiminnan. Antennin sijoittaminen ja liitäntöjen reititys voi kuitenkin olla kompleksinen, aikaa vievä ja erityisasiantuntemusta vaativa prosessi. Tämä saattaa lisätä kustannuksia ja hidastaa markkinoilletuontiaikaa.
Pienikokoinen GNSS-moduuli pienikokoisiin tuotteisiin
Suunnittelutiimit, joilla on tarvittava asiantuntemus antennien sijoittelusta ja liitäntöjen reitityksestä, voivat käyttää STMicroelectronicsin Teseo-LIV3F-moduulia, joka on ulkoista antennia ja useita satelliittijärjestelmiä käyttävä GNSS-moduuli (GPS/Galileo/GLONASS/BeiDou/QZSS) (kuva 4) Moduuli käyttää 9,7 mm x 10,1 mm:n kokoista LCC-18-koteloa. Sen paikannustarkkuus (CEP, Circular Error Probable) on 1,5 metriä (m) ja TTFF (Time To First Fix) -aika kylmäkäynnistyksessä on niinkin alhainen kuin alle 32 sekuntia (s) ja kuumakäynnistyksessä alle 1,5 sekuntia (GPS, GLONASS). Sen tehonkulutus on valmiustilassa 17 mikrowattia (µW) ja seurannassa 75 milliwattia (mW).
 Kuva 4: Tesco-LIV3F GNSS-moduuli sisältää GNSS-ytimen ja -alijärjestelmät sekä kaikki tarvittavat liitännät ja virranhallinnan 9,7 x 10,1 mm:n kokoisessa kotelossa. Laite vaatii ulkoisen antennin. (Kuvan lähde: STMicroelectronics)
Kuva 4: Tesco-LIV3F GNSS-moduuli sisältää GNSS-ytimen ja -alijärjestelmät sekä kaikki tarvittavat liitännät ja virranhallinnan 9,7 x 10,1 mm:n kokoisessa kotelossa. Laite vaatii ulkoisen antennin. (Kuvan lähde: STMicroelectronics)
Tesco-LIV3F:n sisäinen 26 megahertsin (MHz) lämpötilakompensoitu kideoskillaattori (TCXO) auttaa varmistamaan korkean tarkkuuden ja dedikoitu 32 kilohertsin (kHz) reaaliaikakello-oskillaattori (RTC) mahdollistaa lyhyen TTFF-ajan. Laitteen sisältämä 16 megabitin (Mbit) flash-muisti mahdollistaa sellaisia ominaisuuksia kuten tietojen lokikirjoitus, seitsemän päivän autonominen GNSS-tuki, laiteohjelmiston (FW) uudelleenkonfiguroitavuus sekä FW-päivitykset.
Tesco-LIV3F soveltuu sellaisiin käyttökohteisiin kuten vakuutus, logistiikka, lennokit, tietullit, varkaudenestojärjestelmät, ihmisten ja lemmikkieläinten paikannus, ajoneuvojen seuranta sekä hätäpuhelut.
Koska Teseo-LIV3F-moduuli on esisertifioitu ratkaisu, sen käyttö voi lyhentää lopullisen sovelluksen markkinoilletuontiaikaa. Moduulin käyttölämpötila-alue on -40 °C ... +85 °C.
Suunnittelijat voivat käyttää AEK-COM-GNSST31-evaluointikorttia moduulin kokeilemiseen ja sovelluskehityksen nopeuttamiseen. Kun evaluointipakkausta käytetään yhdessä X-CUBE-GNSS1-laiteohjelmiston kanssa, se tukee sijainnin saantia, seurantaa, navigointia sekä tietojen tulostusta tarvitsematta ulkoista muistia. Tämä evaluointikortti on suunniteltu myös käytettäväksi SPC5-mikrokontrollerin kanssa autoteollisuussovellusten kehitystä varten.
GNSS-moduuli häiriöiden vaimennuksella
Septentrion useita satelliittijärjestelmiä käyttävä GNSS-vastaanotin mosaic-X5 410322 on vähävirtainen pintaliitosmoduuli, jonka mitat ovat 31 mm x 31 mm x 4 mm. Se tarjoaa suunnittelijoille useita liitäntöjä, mukaan lukien neljä UART-liitäntää, Ethernet-, USB-, SDIO-liitännät sekä kaksi käyttäjän ohjelmoitavaa GPIO-liitäntää.
mosaic-X5 on suunniteltu käytettäväksi robotiikassa, autonomisissa järjestelmissä ja muissa massamarkkinasovelluksissa. Sen ominaisuuksiin kuuluvat 100 hertsin (Hz) päivitysnopeus, alle 10 millisekunnin (ms) latenssi sekä 0,6 cm:n vertikaalinen ja 1 cm:n horisontaalinen RTK-paikannustarkkuus. Se pystyy seuraamaan kaikkia GNSS-satelliittijärjestelmiä ja tukee nykyisiä ja tulevaisuudessa toteutettavia signaaleja. Se on myös yhteensopiva PPP-, SSR-, RTK- ja SBAS-korjausten kanssa. Moduulin TTFF-aika on alle 45 s kylmäkäynnistyksessä ja alle 20 s lämminkäynnistyksessä.
mosaic-X5 sisältää useita Septentrion patentoimia teknologioita, kuten AIM+, joka on sisäinen häiriöiden vaimennusteknologia, joka vaimentaa erilaisia häiriötekijöitä yksinkertaisista jatkuvista kapeakaistaisista signaaleista kompleksisiin laajakaistaisiin ja pulssitettuihin häirintälähettimiin.
Moduulien liitännät, komennot ja dataviestit on dokumentoitu kattavasti. Tuotteen sisältämä RxTools-ohjelmisto mahdollistaa vastaanottimen konfiguroinnin ja monitoroinnin sekä tiedonkeruun ja analysoinnin.
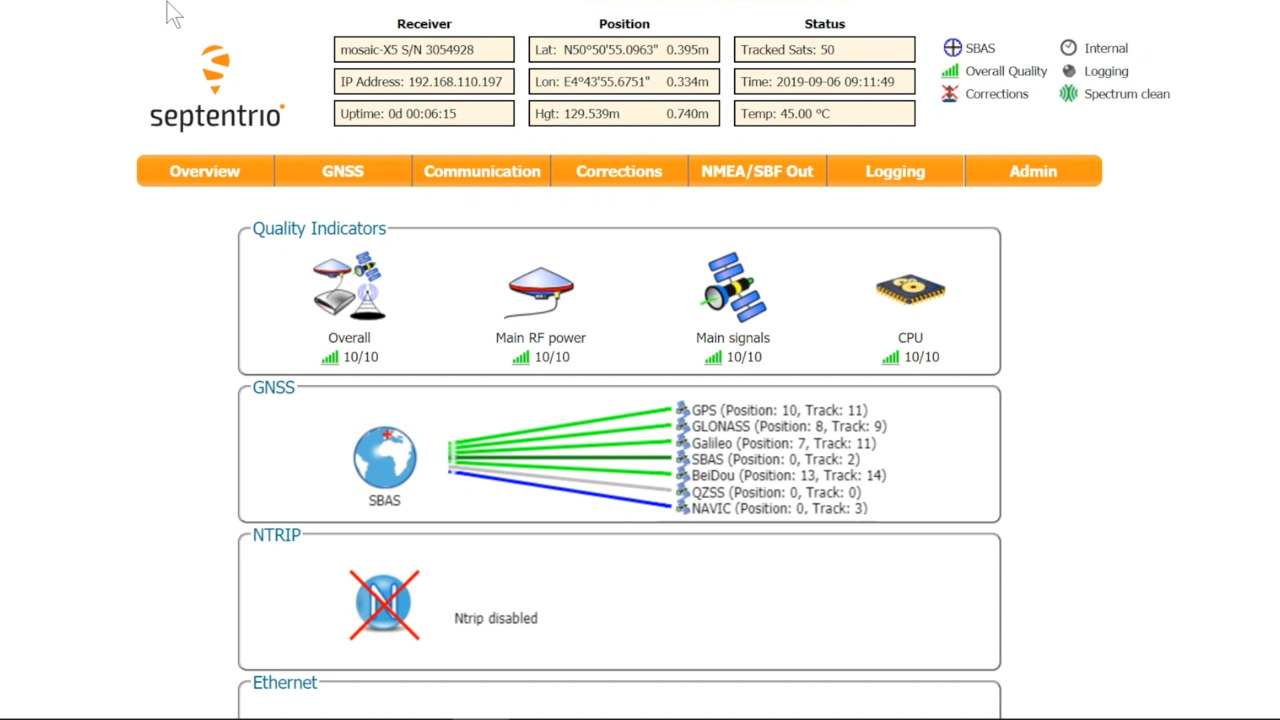
Septentrion mosaic-X5 -kehityssarjan 410331P3161 avulla suunnittelijat voivat tutkia, arvioida ja kehittää prototyyppejä, jotka hyödyntävät mosaic-X5:n ominaisuuksia täysimääräisesti (kuva 5).
 Kuva 5: Suunnittelijat voivat luoda mosaic-X5 410331P3161 -kehityssarjalla prototyypin käyttäen erilaisia liitäntöjä, kuten Ethernet, COM-portit tai USB 2.0, tai käyttämällä SD-muistikorttia. (Kuvan lähde: Septentrio)
Kuva 5: Suunnittelijat voivat luoda mosaic-X5 410331P3161 -kehityssarjalla prototyypin käyttäen erilaisia liitäntöjä, kuten Ethernet, COM-portit tai USB 2.0, tai käyttämällä SD-muistikorttia. (Kuvan lähde: Septentrio)
Sarja käyttää mosaic-X5:n intuitiivista verkkokäyttöliittymää, joka on helppokäyttöinen ja mahdollistaa monitoroinnin. Sen ansiosta suunnittelijat voivat ohjata vastaanotinmoduulia millä tahansa mobiililaitteella tai tietokoneella. Verkkokäyttöliittymä käyttää vastaanottimen toiminnan esittämiseen helppolukuisia laatuindikaattoreita.
Suunnittelijat voivat luoda prototyypin integroimalla siihen mosaic-kehityssarjan käyttäen mitä tahansa seuraavista liitännöistä: Ethernet, COM-portit, USB 2.0, SD-muistikortti.
GNSS-moduuli integroidulla antennilla
Würth Elektronik tarjoaa Erinome-I-moduulin 2614011037000 sellaisten sovellusten suunnittelijoille, joissa voidaan käyttää integroidulla antennilla varustettua GNSS-moduulia. Tämä sisältää tehokkaan järjestelmäpiirin (SoC) (kuva 6). Moduuli tukee GPS-, GLONASS-, Galileo- ja BeiDou-GNSS-satelliittijärjestelmiä. Sen päällä on integroitu antenni, joka helpottaa laitteiston integrointia ja lyhentää markkinoilletuontiaikaa. Moduulin mitat ovat integroidun antennin kanssa 18 mm x 18 mm.
 Kuva 6: 2614011037000 Erinome-I on valmis GNSS-moduuli, joka sisältää erittäin tehokkaan GNSS-järjestelmäpiirin ja integroidun antennin. (Kuvan lähde: Würth Elektronik)
Kuva 6: 2614011037000 Erinome-I on valmis GNSS-moduuli, joka sisältää erittäin tehokkaan GNSS-järjestelmäpiirin ja integroidun antennin. (Kuvan lähde: Würth Elektronik)
Moduuli sisältää myös seuraavat komponentit: TCXO, RF-suodatin, pienikohinainen vahvistin (LNA) ja flash-sarjamuisti.
Würth tarjoaa Erinome-I-moduulia varten myös 2614019037001-evaluointikortin (EVB) (kuva 7). Evaluointikortti voi toimia myös referenssimallina GNSS-moduulin integroinnissa sovellukseen. Evaluointikortti voidaan liittää PC-tietokoneeseen USB-portin kautta. Moninastainen liitin tarjoaa suunnittelijoille pääsyn kaikkiin GNSS-moduulin nastoihin.
 Kuva 7: Erinome-I-moduulia varten tarkoitettu 2614019037001-evaluointikortti (moduuli lähellä kortin keskiosaa, integroitu antenni näkyy moduulin keskellä) toimii myös referenssimallina. (Kuvan lähde: Würth Elektronik)
Kuva 7: Erinome-I-moduulia varten tarkoitettu 2614019037001-evaluointikortti (moduuli lähellä kortin keskiosaa, integroitu antenni näkyy moduulin keskellä) toimii myös referenssimallina. (Kuvan lähde: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) on yksinkertainen PC-työkalu, jonka avulla Erinome-I GNSS-moduulin kanssa voidaan keskustella UART-liitännän kautta. Se tukee seuraavia ominaisuuksia:
- Evaluointikortin toiminnan ohjaus
- Kaksisuuntainen tiedonsiirto Erinome-I-moduulin kanssa
- Erinome-I-moduulin toimintojen ja ominaisuuksien evaluointi
- Perehtyminen Erinome-I-protokolliin, -lauseisiin ja -komentoihin
- Erinome-I-moduulin konfigurointi ilman protokollien tuntemusta
- Erinome-I-moduulin käyttämien lauseiden ja komentojen parsiminen.
WENSS mahdollistaa paikannussovellusten helpon evaluoinnin ilman erityisosaamista. Kokeneet kehittäjät voivat käyttää WENSS-työkalua myös edistyneempiin konfigurointeihin.
Yhteenveto
Tarkka ja luotettava paikannuskyky saavutetaan parhaiten useita satelliittijärjestelmiä ja niihin sopivaa korjaustekniikkaa käyttämällä. Nämä ovat kompleksisia järjestelmiä, mutta suunnittelijat voivat käyttää valmiita GNSS-moduuleja, niihin liittyviä kehityssarjoja ja -ympäristöjä ja vertailla näin nopeasti ja tehokkaasti vaihtoehtoja ja toteuttaa paikannuspohjaisia ominaisuuksia ja palveluja.
Suositeltavaa luettavaa
- Use IMUs for Precise Location Data When GPS Won’t Suffice (Käytä inertiamittausyksiköitä tarkkojen sijaintitietojen saantiin, kun GPS ei riitä)
- IMUs for Precise Location: Part 2 – How to Use IMU Software for Greater Precision (Inertiamittausyksiköt tarkkaa sijaintia varten: Osa 2 – Suurempi tarkkuus IMU-ohjelmiston avulla)
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.