Solenoidi- ja askelmoottoriohjaimien käyttö teollisuussovelluksissa
Julkaisija DigiKeyn kirjoittajat Pohjois-Amerikassa
2024-02-07
Reunalaitesovelluksissa, kuten tehdasympäristön ohjausjärjestelmissä, autoteollisuudessa ja laboratoriolaitteissa, käytetään yhä enemmän esineiden internetin (IoT) ja tekoälyn (AI) ominaisuuksia päätostenteon nopeuttamiseksi, suorituskyvyn kasvattamiseksi, kustannusten laskemiseksi sekä turvallisuuden ja tuottavuuden lisäämiseksi. Solenoidien ja askelmoottoreiden ohjaimia täytyy jatkokehittää, jotta niihin voidaan sisällyttää enemmän antureita ja älykkyyttä helpottamaan niiden integrointia tähän nopeasti kehittyvään ympäristöön ja jotta tarkkuutta, luotettavuutta, suljetun silmukan ohjausta, tilantarvetta, kustannuksia ja helppokäyttöisyyttä voitaisiin parantaa entisestään.
Tämä artikkeli tarjoaa yhteenvedon solenoidien ja askelmoottoreiden perustoiminnoista ja kertoo älykkääseen reunaympäristöön suunniteltujen ohjainmikropiirien hyödyistä. Se selittää sen jälkeen, miten suunnittelun voi aloittaa Analog Devices -yrityksen esimerkkiohjainten avulla.
Solenoidit ja askelmoottorit: samanlaisia mutta kuitenkin erilaisia
Solenoidit ja askelmoottorit muuttavat sähkövirran fyysiseksi liikkeeksi sähkömagneettina toimivan käämin kautta. Niiden ulkonäöllisistä ja toiminnallisista eroista huolimatta kelan samankaltaisuus mahdollistaa sen, että tietyissä olosuhteissa samaa ohjainmikropiiriä voidaan käyttää molemmissa aktuaattoreissa.
Solenoidit ovat suhteellisen yksinkertaisia komponentteja, jotka synnyttävät lineaarista mekaanista liikettä, kun niihin kytketään sähkövirta. Ne koostuvat lieriömäisen putken ympärille kierretystä sähkökäämistä. Putken ontossa ytimessä on ferromagneettinen aktuaattori (jota kutsutaan myös männäksi tai ankkuriksi) (kuva 1, vasemmalla), joka voi liikkua vapaasti käämin rungossa.
Askelmoottoreissa käytetään puolestaan useita staattorikäämejä, jotka on sijoitettu moottorin rungon ympärille (kuva 1, oikealla). Moottorin roottoriin on myös kiinnitetty joukko kestomagneetteja.
") Kuva 1: Solenoidirakenteeseen kuuluu käämi, jonka sisällä on liukuva mäntä (vasemmalla). Askelmoottorit ovat monimutkaisempia. Niissä on kestomagneetteja roottorissa ja sähkömagneettisia käämejä sijoitettuina staattorin ympärille (oikealla). (Kuvien lähteet: Analog Devices, Monolithic Power Systems)
Kuva 1: Solenoidirakenteeseen kuuluu käämi, jonka sisällä on liukuva mäntä (vasemmalla). Askelmoottorit ovat monimutkaisempia. Niissä on kestomagneetteja roottorissa ja sähkömagneettisia käämejä sijoitettuina staattorin ympärille (oikealla). (Kuvien lähteet: Analog Devices, Monolithic Power Systems)
Männän liike on solenoideissa yksittäinen ”isku”, joka tapahtuu kytkettäessä virta, jolloin mäntä iskeytyy ääriasentoonsa. Kun virta katkaistaan, useimmat solenoidit palauttavat männän jousen avulla nimelliseen lepoasentoonsa.
Kaikkein yksinkertaisimmassa ohjausjärjestelmässä solenoidia ohjataan terävällä virtapulssilla päälle/pois. Vaikka tämä onkin yksinkertaista ja suoraviivaista, haittapuoliin kuuluvat korkea iskuvoima, tärinä, melu ja sähköinen kohina, sähköinen tehottomuus sekä männän liikkeen ja palautuksen vähäinen hallinta.
Askelmoottorin pyörintäliike aktivoituu, kun staattorikäämit energisoidaan peräkkäin, ja tästä syntyvä pyörivä magneettikenttä vetää ankkurimagneetteja. Järjestystä ohjaamalla askelmoottorin roottori voidaan saada pyörimään jatkuvasti, pysähtymään tai vaihtamaan suuntaa.
Ajoitus ei ole solenoideissa kriittistä, mutta staattorikäämit on muun muassa energisoitava järjestyksessä ja käyttäen oikeaa pulssinleveyttä.
Älykkäät ohjaimet ratkaisevat rajoituksia ja parantavat suorituskykyä
Ohjaamalla huolellisesti solenoidien ja askelmoottoreiden käämeihin syötettävää virtaa, mukaan lukien sen aaltoprofiilin muotoa, käynnistyksen ja sammutuksen muutosnopeutta ja muita parametreja, älykäs ohjain voi tarjota monia hyötyjä:
- tasaisempi liike ja pyörintä minimaalisella värinällä
- vähemmän tärinää ja iskuja, erityisesti solenoidien kohdalla
- tarkempi asemointi askelmoottorin käynnistys/pysäytys/suunnanvaihto-toiminnoissa
- tasainen suorituskyky ja mukautuminen hetkellisiin tai vaihteleviin kuormitusolosuhteisiin
- parempi hyötysuhde
- vähemmän fyysistä kulumista
- vähemmän melua ja sähköistä kohinaa
- helppo kytkeä valvontaprosessoriin, mikä on tärkeää IoT-järjestelmissä.
Analog Devices -yrityksen integroitu ja sarjaohjattu solenoidi- ja moottorinohjain MAX22200 näyttää, mitä sofistikoitunut ohjain voi tehdä solenoideille (kuva 2). Tähän 36 voltin mikropiiriin kuuluvat kahdeksan 1 ampeerin (A) puolisiltaohjainta voidaan konfiguroida rinnakkain ohjausvirran kaksinkertaistamiseksi. Vaihtoehtoisesti ne voidaan konfiguroida täyssilloiksi jopa neljän lukittavan venttiilin (kutsutaan myös bistabiileiksi venttiileiksi) ohjausta varten.
") Kuva 2: Analog Devices MAX22200 on integroitu sarjaohjattu solenoidi- ja moottorinohjain, johon kuuluu kahdeksan puolisiltaohjainta, jotka voidaan järjestää erilaisiin konfiguraatioihin. (Kuvan lähde: Analog Devices)
Kuva 2: Analog Devices MAX22200 on integroitu sarjaohjattu solenoidi- ja moottorinohjain, johon kuuluu kahdeksan puolisiltaohjainta, jotka voidaan järjestää erilaisiin konfiguraatioihin. (Kuvan lähde: Analog Devices)
Tämä ohjain tukee kahta ohjausmenetelmää: jänniteohjauksen säätöä (VDR) ja virtaohjauksen säätöä (CDR). VDR-säädössä laite tuottaa pulssinleveysmoduloidun (PWM) jännitteen, jonka käyttöjakso ohjelmoidaan SPI-liitännän kautta. Lähtövirta on verrannollinen ohjelmoituun käyttöjaksoon tietyllä syöttöjännitteellä ja solenoidivastuksella. Virtaohjauksen säätö on eräs suljetun silmukan ohjauksen muoto, jossa integroitu häviötön virtamittauspiiri mittaa lähtövirran ja vertaa sitä sisäiseen ohjelmoitavaan referenssivirtaan.
Toisin kuin yksinkertaiset virtalähdeohjaimet, MAX22200 mahdollistaa virranohjausprofiilin räätälöinnin. Tehonhallinnan optimoimiseksi solenoidiohjaussovelluksissa kullekin kanavalle voidaan konfiguroida erikseen heräteohjaustaso (IHIT), pito-ohjaustaso (IHOLD) ja heräteohjausaika (tHIT). Tämä ohjain tarjoaa myös useita suojaukseen ja vianhallintaan liittyviä ominaisuuksia:
- ylivirtasuojaus (OCP)
- avoimen kuorman (OL) tunnistus
- terminen katkaisu (TSD)
- alijännitteen lukitus (UVLO)
- männän liikkeen tunnistus (DPM) ja todentaminen.
Neljä ensimmäistä ominaisuutta ovat yleisiä ja selkeitä. DPM vaatii lisäselitystä. Jos venttiili esimerkiksi toimii oikein, kun solenoidi aktivoidaan solenoidiohjatussa venttiilissä, virran profiili ei ole monotoninen (kuva 3, musta käyrä). Siinä näkyy sen sijaan männän liikkeen aiheuttamasta sähkömotorisesta vastavoimasta johtuva notkahdus (BEMF) (kuva 3, sininen käyrä).
 Kuva 3: MAX22200 voi solenoidia ohjatessaan tunnistaa juuttuneen solenoidin tai venttiilin. Tämä tapahtuu etsimällä odotettua sähkömotorisen vastavoiman synnyttämää virran notkahdusta suhteessa raja-arvoon (IDPM_TH) samalla kun solenoidia ohjataan käynnistysvirrasta (ISTART) lopulliselle heräteohjaustasolle (IHIT). (Kuvan lähde: Analog Devices)
Kuva 3: MAX22200 voi solenoidia ohjatessaan tunnistaa juuttuneen solenoidin tai venttiilin. Tämä tapahtuu etsimällä odotettua sähkömotorisen vastavoiman synnyttämää virran notkahdusta suhteessa raja-arvoon (IDPM_TH) samalla kun solenoidia ohjataan käynnistysvirrasta (ISTART) lopulliselle heräteohjaustasolle (IHIT). (Kuvan lähde: Analog Devices)
Kun MAX22200-ohjaimeen konfiguroidaan DPM-toiminto ja sitä käytetään solenoidien kanssa, ohjain tunnistaa BEMF-voiman synnyttämän notkahduksen herätevaiheen aikana. Jos notkahdusta ei havaita, FAULT-nastaan ja sisäiseen vikarekisteriin asetetaan tästä tieto.
Evaluointisarjat helpottavat prosessia
Jotta järjestelmän suorituskykyyn liittyvät kysymykset voidaan ratkaista erilaisia staattisia ja dynaamisia vaatimuksia ja kuormitusolosuhteita varten, Analog Devices tarjoaa MAX22200-ohjainta varten solenoidinohjauksen tehonhallinnan evaluointikortin MAX22200EVKIT# (kuva 4). Tämä evaluointisarja (EVK) mahdollistaa MAX22200-ohjaimen sarjaohjauksen ja vikavalvonnan sisäänrakennetun USB-SPI-liitännän kautta MAX32625-mikrokontrollerilla. Se tarjoaa Windows-yhteensopivan graafisen käyttöliittymän (GUI) MAX22200-mikropiirin ominaisuuksien kokeiluun, mikä tekee siitä täydellisen PC-pohjaisen arviointijärjestelmän.
 Kuva 4: MAX22200-ohjaimelle tarkoitettu solenoidinohjauksen tehonhallinnan evaluointikortti MAX22200EVKIT# mahdollistaa mikropiirin ja sen kuorman kattavan testauksen Windows-pohjaisen graafisen käyttöliittymän kautta. (Kuvan lähde: Analog Devices)
Kuva 4: MAX22200-ohjaimelle tarkoitettu solenoidinohjauksen tehonhallinnan evaluointikortti MAX22200EVKIT# mahdollistaa mikropiirin ja sen kuorman kattavan testauksen Windows-pohjaisen graafisen käyttöliittymän kautta. (Kuvan lähde: Analog Devices)
Tämä täysin koottu ja testattu kortti voidaan konfiguroida ylä- ja alapuolen solenoidiksi sekä lukittuville venttiileille (joita usein ohjataan solenoideilla) sekä harjallisille DC-moottoreille.
Askelmoottorit: enemmän vapausasteita ohjaukseen
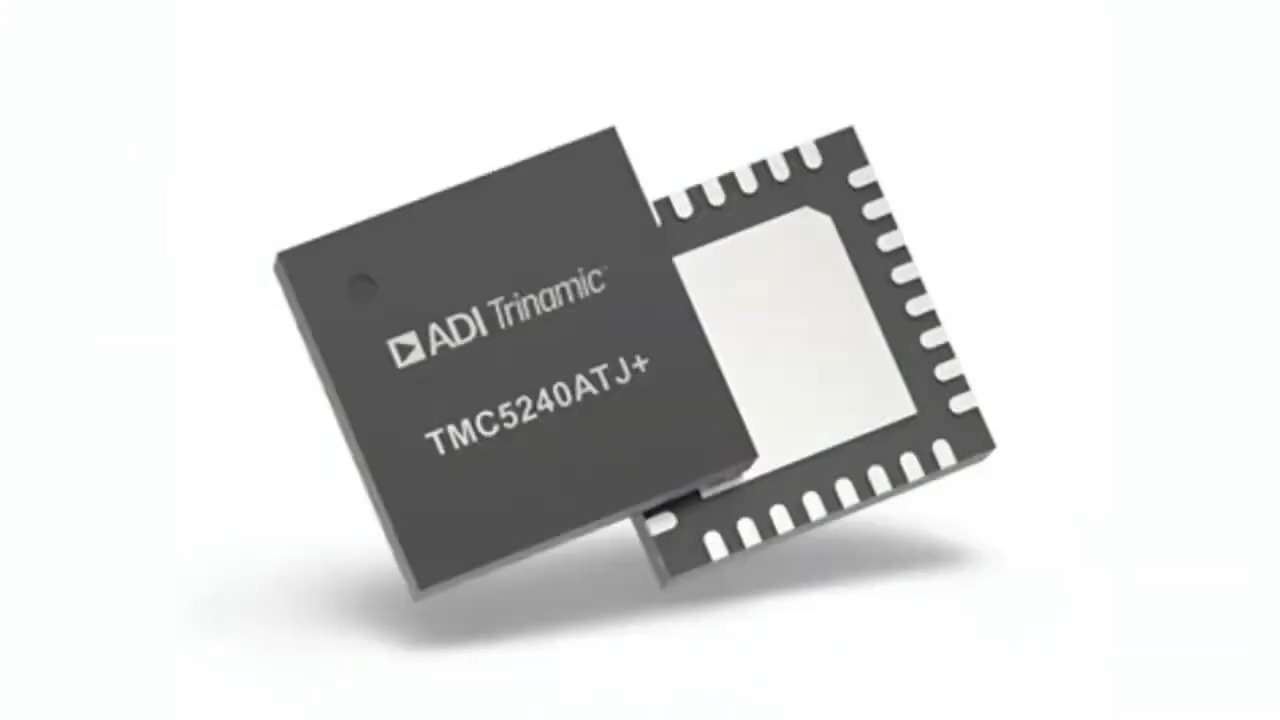
Askelmoottorit ovat monimutkaisempia kuin solenoidit, ja niiden ohjaukseen liittyy enemmän vaatimuksia. Tämä on nähtävissä Analog Devices TMC5240 -piirin (kuva 5) ominaisuuksissa. Se on integroitu huipputehokas sarjaliikenneliitännöillä (SPI, UART), kattavilla diagnostiikkatoiminnoilla ja sulautetuilla algoritmeilla varustettu askelmoottorikontrolleri ja ohjainmikropiiri.
") Kuva 5: Huipputehokas askelmoottorikontrolleri ja ohjainmikropiiri TMC5240 käyttää sofistikoituneita algoritmeja tarjotakseen optimaalisen suorituskyvyn solenoidien ja askelmoottoreiden ohjaamisessa. (Kuvan lähde: Analog Devices)
Kuva 5: Huipputehokas askelmoottorikontrolleri ja ohjainmikropiiri TMC5240 käyttää sofistikoituneita algoritmeja tarjotakseen optimaalisen suorituskyvyn solenoidien ja askelmoottoreiden ohjaamisessa. (Kuvan lähde: Analog Devices)
Tämä mikropiiri käyttää joustavaa kahdeksan pisteen ramppigeneraattoria, joka minimoi nykäykset kohteiden automaattisessa paikannuksessa. Nykäys liittyy kiihtyvyyden muutosnopeuteen, ja liian voimakas nykäys voi aiheuttaa monia järjestelmä- ja suorituskykyongelmia. Tähän askelmoottorikontrolleriin on integroitu 36 voltin 3 A:n H-sillat 0,23 ohmin (Ω) johtamisresistanssilla ja tehohäviöttömällä integroidulla virtamittauksella (ICS). TMC5240 on saatavana pienessä, 5 × 5 millimetrin (mm) TQFN32-kotelossa ja lämpöoptimoidussa 9,7 × 4,4 mm:n TSSOP38-kotelossa avoimella juotoskohdalla.
TMC5240 tarjoaa ainutlaatuisia ja edistyneitä ominaisuuksia, jotka mahdollistavat paremman tarkkuuden, korkean energiatehokkuuden, korkean luotettavuuden, tasaisen liikkeen ja viileän toiminnan. Näihin ominaisuuksiin kuuluvat:
- StealthChop2: Meluton, erittäin tarkka hakkurialgoritmi takaa moottorin äänettömän liikkeen ja pysäytyksen sekä mahdollistaa moottorin nopeamman kiihdytyksen ja hidastuksen kuin yksinkertaisempi StealthChop
- SpreadCycle: Erittäin tarkka syklikohtainen virranohjaus erittäin dynaamisia liikkeitä varten
- StallGuard2: Tarjoaa anturittoman pysähtymisen tunnistuksen ja mekaanisen kuorman mittauksen SpreadCycle-ominaisuutta varten
- StallGuard4: Tarjoaa anturittoman pysähtymisen tunnistuksen ja mekaanisen kuorman mittauksen StealthChop-ominaisuutta varten
- CoolStep: Käyttää StallGuard-mittausta moottorin virran säätämiseen parhaan mahdollisen hyötysuhteen ja moottorin ja ohjaimen minimaalisen lämpenemisen saavuttamiseksi.
Nämä ominaisuudet voidaan esiasettaa ja ne voidaan ottaa käyttöön moottorin toimintajakson aikana. Lisäksi vääntömomenttia voidaan ohjata yhdessä kiihdytyksen kanssa halutun arvon saavuttamiseksi ja samalla tehokkaan ja tasaisen kiihdytyksen ja hidastuksen takaamiseksi.
Kolmen kiihdytys- ja hidastussegmentin sarjaa voidaan esimerkiksi käyttää kahdella tavalla: moottorin vääntömomenttikäyrään sopeuttamiseen käyttämällä korkeampia kiihdytysarvoja pienemmällä nopeudella tai nykäyksen vähentämiseen siirryttäessä kiihdytyssegmentistä toiseen. TMC5240 sisältää kahdeksan pisteen liikeprofiiligeneraattorin, mikä mahdollistaa kummassakin tavassa sen, että kontrolleri voi pysyä vakionopeussegmentissä silloinkin kun haluttu tavoiteasento muuttuu reaaliaikaisesti, mikä johtaa nykäyksettömiin siirtymiin tilasta toiseen (kuva 6).
") Kuva 6: TMC5240 käyttää kahdeksan pisteen ramppia, joka mahdollistaa tavoiteasennon vaihdon lennossa ja nykäyksettömät siirtymät tilasta toiseen. (Kuvan lähde: Analog Devices)
Kuva 6: TMC5240 käyttää kahdeksan pisteen ramppia, joka mahdollistaa tavoiteasennon vaihdon lennossa ja nykäyksettömät siirtymät tilasta toiseen. (Kuvan lähde: Analog Devices)
TMC5240-EVAL-evaluointikortti on tervetullut täydennys (kuva 7) mitä tulee tämän ohjainmikropiirin joustavuuteen, monipuolisuuteen ja kompleksisuuteen. Se käyttää mikropiirin standardimallista piirikaaviota, ja sen ohjelmisto tarjoaa useita vaihtoehtoja, joiden avulla suunnittelijat voivat testata eri toimintatiloja.
 Kuva 7: Suunnittelijat voivat tutkia ja hienosäätää TMC5240-piirin suorituskykyä halutulla aktuaattori- ja kuormayhdistelmälla TMC5240-EVAL-evaluointikortin ja siihen liittyvän graafisen käyttöliittymän avulla. (Kuvan lähde: Analog Devices)
Kuva 7: Suunnittelijat voivat tutkia ja hienosäätää TMC5240-piirin suorituskykyä halutulla aktuaattori- ja kuormayhdistelmälla TMC5240-EVAL-evaluointikortin ja siihen liittyvän graafisen käyttöliittymän avulla. (Kuvan lähde: Analog Devices)
Analog Devices tarjoaa suunnittelijoille, joiden arviointi- ja suunnitteluvaatimukset ovat vähemmän kompleksisia, myös tuotteen TMC5240-BOB. Tämä perusmikropiirin kytkentäkortti tuo TMC5240-piirin fyysiset nastaliitännät helppokäyttöisiin piirilevyliittimiin.
Yhteenveto
Älykkyyden lisääminen solenoidi- ja askelmoottoriohjaimiin mahdollistaa paremman ohjauksen ja vikojen tunnistuksen, reaaliaikaisen päätöksenteon ja kommunikoinnin ylempitasoisten ohjausjärjestelmien tai tekoälyyn perustuvien tuotantojärjestelmien kanssa. Valitsemalla korkeasti integroidun ohjaimen, kuten Analog Devices MAX22200 tai TMC5240, käyttäjät voivat ottaa nopeasti käyttöön kehittyneitä algoritmeja solenoidien ja askelmoottorien suorituskyvyn optimoimiseksi omissa sovelluksissaan.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.