Miten pk-yritykset voivat käyttää teollista metaversumia robottiratkaisujen nopeaan tutkimiseen ja käyttöönottoon
Julkaisija DigiKeyn kirjoittajat Pohjois-Amerikassa
2024-11-21
Robotit ja yhteistyörobotit (cobotit) ovat tehdasautomaation teknologiakehityksen kärkeä. Digitaaliset kaksoset ja virtuaalitodellisuus (VR) ovat johtavia suunnittelu- ja tuotekehitystyökaluja. Yhdessä niiden avulla voidaan luoda teollinen metaversumi, joka nopeuttaa tuottavuuden parantamista jopa pienissä ja keskisuurissa yrityksissä (pk-yrityksissä).
Pk-yritysten suunnittelijat voivat hyödyntää yksinkertaista ja intuitiivista käyttöliittymää, jossa yhdistyvät digitaalinen kaksonen – erittäin yksityiskohtainen virtuaalimalli fyysisestä kohteesta, kuten delta-, lineaari- tai moniakselisesta robotista – ja kolmiulotteinen (3D) virtuaalitodellisuusympäristö (VR), joka mahdollistaa robotin liikesarjojen suoran suorittamisen ja tarkistamisen.
Näiden ominaisuuksien käyttö mahdollistaa automaatiojärjestelmän hienosäädön ja optimoinnin jopa ilman fyysistä laitteistoa sekä erilaisten ratkaisuvaihtoehtojen nopean tutkimisen.
Tämä artikkeli tarkastelee ensin matemaattisen, dataa kuvaavan digitaalisen kaksosen ja visuaalisen digitaalisen kaksosen (VR-kaksosen) välistä eroa ja sitä, miten molempia tarvitaan teollisen metaversumin luontiin. Se esittelee sen jälkeen Igusin robottiohjausjärjestelmän ja siihen liittyvän ohjelmiston, jonka avulla robottia voidaan simuloida 3D-käyttöliittymässä (visuaalinen digitaalinen kaksonen) ilman fyysisen laitteiston käyttöä, kuten myös yhteensopivat delta-, lineaari- ja moniakseliset robotit, joita voidaan käyttää optimoidun ratkaisun toteuttamiseen.
Digitaaliset kaksoset ja virtuaalitodellisuus (VR) ovat toisiaan täydentäviä teknologioita, jotka käyttävät erilaisia visualisointimuotoja, vuorovaikutusta ja laitteistoja. Digitaaliset kaksoset ovat dataan perustuvia malleja fyysisistä objekteista, järjestelmistä tai prosesseista. Ne on suunniteltu käytettäväksi mallinnettavan kohteen koko elinkaaren ajan alkuperäisestä suunnittelusta käytöstä poistamiseen ja kierrätykseen.
VR on immersiivinen, visuaalinen teknologia, joka käyttää myös digitaalisia malleja. VR-ympäristössä on mahdollista simuloida objektien välisiä suhteita ja vuorovaikutusta, esimerkkinä tehtävää suorittava robotti. Vaikka kumpaakin teknologiaa voidaankin käyttää suunnitteluun ja simulointiin, digitaalinen kaksosteknologia keskittyy elinkaaren aikaisiin yleisiin näkökohtiin, kun taas virtuaalitodellisuus keskittyy fyysisten objektien väliseen vuorovaikutukseen.
Metaversumi yhdistää digitaaliset kaksoset ja virtuaalitodellisuuden tarkoitusta varten luoduksi virtuaaliympäristöksi, joka mahdollistaa reaaliaikaisen vuorovaikutuksen digitaalisten objektien ja ihmisten välillä. Se yhdistetään usein pelaamiseen, mutta sitä käytetään yhä useammin liiketoiminnassa ja teollisuudessa.
Tervetuloa iguverseen
Igus on kehittänyt iguverse-metaversumin tukemaan teknistä vuorovaikutusta teollisuusympäristöissä, kuten robottijärjestelmien kehittämisessä ja käyttöönotossa. iguverse voidaan toteuttaa Igus Robot Control (iRC) -ohjelmiston avulla. Käyttäjät voivat ohjata tällä ilmaisella ja lisenssivapaalla sovelluksella erityyppisiä robotteja, kuten deltarobotteja, cobotteja (robottikäsivarret) ja portaalirobotteja.
Se tarjoaa käyttäjille 3D-käyttöliittymän ja yli 100 esimerkkiohjelmaa. iRC:n käyttöönoton järjestelmävaatimuksiin kuuluu PC (vähintään Intel i5 -suoritin), jossa on Windows 10 tai 11 (64-bittinen), 500 Mt vapaata levytilaa ja Ethernet- tai langaton verkkoyhteys.
Ohjelmiston ydin on ohjelmoitavan robotin digitaalinen 3D-kaksonen. Esimerkin tästä tarjoaa kolmiakselinen lineaarinen portaalirobotti, kuten malli DLE-RG-0001-AC-500-500-100, jonka työtilan koko on 500 x 500 x 100 mm, tai kaksiakselinen xy-aktuaattori, kuten malli DLE-LG-0012-AC-800-500 työtilakoolla 800 x 500 mm (kuva 1). Suunnittelijat voivat määritellä liikkeet muutamalla hiiren napsautuksella ja varmistaa 3D-mallin avulla jo ennen robotin hankintaa, että vaaditut liikkeet ovat toteutettavissa.
 Kuva 1: Esimerkki kolmiakselisen portaalirobotin digitaalisesta 3D-VR-kaksosesta iguversessa. (Kuvan lähde: Igus)
Kuva 1: Esimerkki kolmiakselisen portaalirobotin digitaalisesta 3D-VR-kaksosesta iguversessa. (Kuvan lähde: Igus)
iRC-ohjelmiston lisäksi robottiohjain on tärkeä osa iguverse-kehitysympäristöä. Esimerkiksi malli IRC-LG12-02000 on tarkoitettu 48 V:n moottoreille ja sisältää seitsemän tuloa ja seitsemän lähtöä sekä 10 metrin kaapelin robottiin liittämistä varten. IRC-ohjaimet sisältävät moottorinohjausmoduulit erikokoisille bipolaarisille askelmoottoreille, ja ne ovat saatavana konfiguroitavina tai valmiiksi konfiguroituina versioina. Ohjaimessa on myös useita rajapintoja järjestelmäintegraatiota varten, kuten:
- ohjelmoitavan logiikkaohjaimen (PLC) rajapinta, käyttää ohjaukseen digitaalisia tuloja ja lähtöjä, erityisesti ohjelmien helppoon käynnistämiseen ja pysäyttämiseen PLC:n tai painikkeen kautta
- Modbus TCP -rajapinta ohjaukseen PLC:n tai PC:n kautta
- Common Robotic Interface (CRI) Ethernet ohjaukseen ja konfigurointiin PLC:n tai PC:n avulla
- Robot Operating System (ROS) -rajapinta robotin käyttämiseen ROS:n avulla
- rajapinta kohteiden tunnistuskameroita varten
- pilvirajapinta robotin tilan etävalvontaa varten.
Tuettu kinematiikka
iguverse tukee erilaisia kinematiikoita (perusliikkeitä), jotka määrittelevät robotin hallitun liikkeen. Valmiiksi konfiguroidun kinematiikan lisäksi IRC-sovelluksessa voidaan konfiguroida jopa kolme muuta kinemaattisesti riippumatonta akselia. Valmiiksi konfiguroituihin kinematiikkoihin kuuluvat:
- 2-akseliset ja 3-akseliset deltarobotit
- Portaalirobotit
- 2-akseliset (X- ja Y-akseli)
- 2-akseliset (Y- ja Z-akseli)
- 3-akseliset (X-, Y- ja Z-akseli)
- Robottikäsivarret (cobotit)
- 3-akseliset (akselit 1, 2, 3)
- 3-akseliset (akselit 2, 3, 4)
- 4-akseliset (akselit 1, 2, 3, 4)
- 4-akseliset (akselit 2, 3, 4, 5)
- 5-akseliset (akselit 1–5)
- 6-akseliset (akselit 1–6)
- 4-akselinen SCARA-robotti
Helppo ohjelmointi kustannustehokasta automaatiota varten
Igus-robotit ja IRC on suunniteltu mahdollistamaan kustannustehokas automaatio. Se ei olisi mahdollista ilman helppokäyttöistä ohjelmointirajapintaa. Robottia voidaan liikuttaa ja asemoida iguversessa 3-painikkeisella hiirellä tai peliohjaimella. IRC-ohjelmiston avulla käyttäjä voi liikuttaa digitaalisen kaksosen kaikkia akseleita vapaasti 3D-käyttöliittymässä. Opetustoiminto tukee robotinohjausohjelmiston kehittämistä, vaikka fyysistä robottia ei olisikaan liitetty.
Opetustoimintoa käytetään siten, että käyttäjä siirtää virtuaalisen robotin manuaalisesti haluttuun asentoon ja määrittelee, miten se liikkuu siinä. Prosessia toistetaan, kunnes on luotu täydellinen liikeprofiili. IRC-ohjelmiston työkalukeskus tarjoaa käyttäjille mahdollisuuden lisätä sopivia päätetyövälineitä, kuten tarttujia, ja säätää helposti ja automaattisesti työkalun keskipiste robotissa. Lisäksi voidaan lisätä yhteys korkeamman tason teollisuusohjausjärjestelmään.
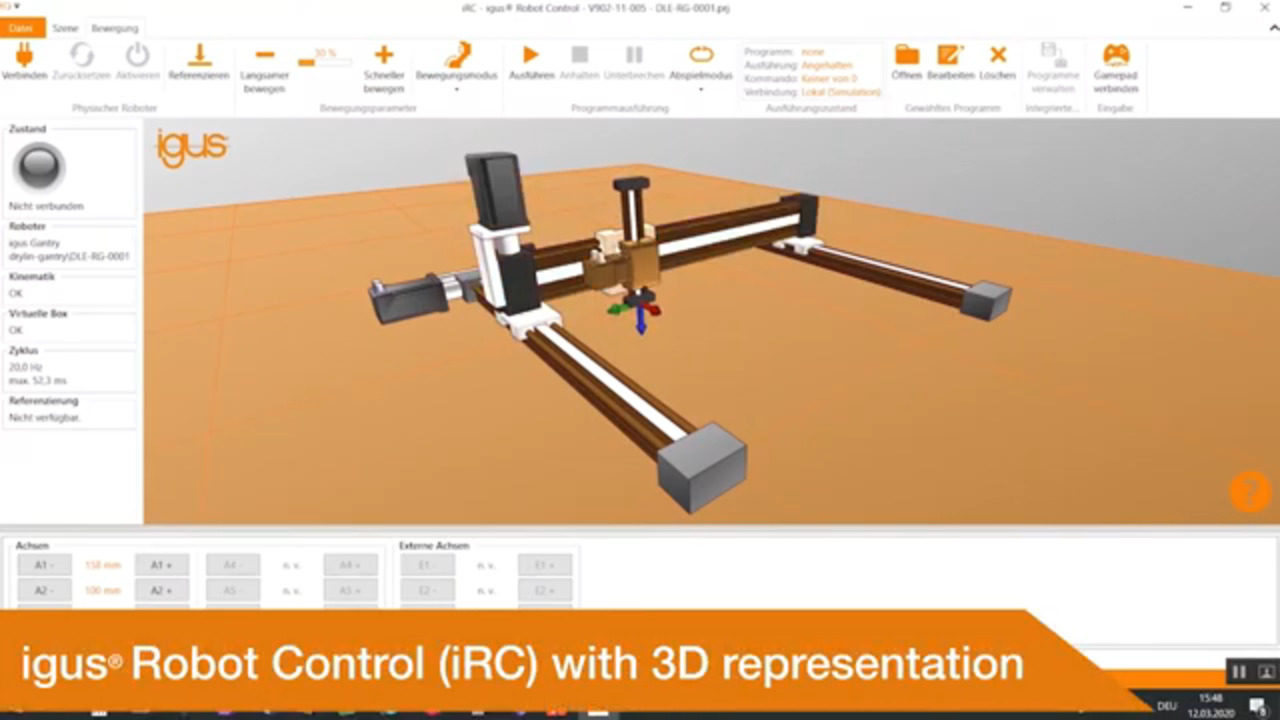
Prosessi alkaa aktivoimalla robotti käyttämällä käyttöliittymän kulloinkin tarvittavia painikkeita ”connect” (yhdistä), ”reset” (nollaa) ja ”enable” (aktivoi). IRC-ohjelmiston tilaledin tulee muuttua vihreäksi ja tilana tulee olla ”No Error” (Ei virheitä). Liikeprofiili voidaan nyt syöttää välilehdellä ”Jogging” (Manuaalinen ohjaus) (kuva 2).
 in the iguverse immersive development environment (click to enlarge)") Kuva 2: iguversen immersiivisen kehitysympäristön ”Jogging” (Manuaalinen ohjaus) -välilehteä (alavasemmalla) voidaan käyttää liikeprofiilien syöttämiseen. (Kuvan lähde: Igus)
Kuva 2: iguversen immersiivisen kehitysympäristön ”Jogging” (Manuaalinen ohjaus) -välilehteä (alavasemmalla) voidaan käyttää liikeprofiilien syöttämiseen. (Kuvan lähde: Igus)
Portaalirobotit
Portaalirobotit, kuten edellisissä iguverse-esimerkeissä esitetyt robotit, koostuvat kahdesta X-perusakselista, Y-akselista ja haluttaessa Z-akselista. Y-akseli on kiinnitetty kahteen samansuuntaiseen X-akseliin, ja se liikkuu edestakaisin kaksiulotteisessa tilassa. Valinnainen Z-akseli mahdollistaa liikkeeseen kolmannen ulottuvuuden.
Igusin portaaliroboteissa on itsevoitelevat muovilaakerit, jotka liukuvat ja pyörivät pehmeämmin ja hiljaisemmin kuin perinteiset kuulalaakereihin perustuvat mallit. Uusi rakenne on kevyempi, korroosionkestävä ja huoltovapaa, mitkä ovat tärkeitä ominaisuuksia pk-yrityksille. Pk-yrityksien kannalta on ratkaisevan tärkeää myös se, että nämä robotit ovat jopa 40 prosenttia perinteisiä portaalirobotteja halvempia ja maksavat investoinnin takaisin nopeammin.
Nämä robotit soveltuvat kahteen eri sovellusluokkaan: alhaisiin nopeuksiin suurilla kuormilla tai korkeisiin nopeuksiin pienillä kuormilla. Esimerkkisovelluksiin kuuluvat pakkaaminen, ladonta, merkitseminen, materiaalinkäsittely ja kokoonpanotoiminnot.
Niitä on tarjolla useissa eri kokoluokissa. Saatavilla oleviin lisävarusteisiin kuuluvat kytkimet, päätetyövälineet ja moottorilaipat. Esimerkkejä keskikokoisista portaaliroboteista:
- DLE-FG-0006-AC-650-650 on kaksiulotteinen litteä portaalirobotti työtilalla 650 x 650 mm. Tämä robotti pystyy käsittelemään jopa 8 kg:n painoisia hyötykuormia, ja sen dynaaminen nopeus on jopa 20 poimintaa minuutissa.
- DLE-RG-0012-AC-800-800-500 on kolmiulotteinen portaali työtilalla 800 x 800 x 500 mm. Se pystyy käsittelemään jopa 10 kg:n painoisia hyötykuormia dynaamisella nopeudella jopa 20 poimintaa minuutissa.
Paletointiprosessi
Tuotteiden paletointi lähetystä varten on jokapäiväinen tehtävä tuotanto- ja logistiikkatoiminnassa. iguverse-sarjan uusin ja suurin jäsen on XXL-suurportaalirobotti, joka tarjoaa työtilan 2000 x 2000 x 1500 mm ja soveltuu hyvin jopa 10 kg:n paletointisovelluksiin. Saatavilla on myös räätälöityjä malleja, joiden työtila vi olla jopa 6000 x 6000 x 1500 mm.
Nämä portaalirobotit voivat poimia jopa 10 kg:n painoisia osia, kuljettaa ne jopa nopeudella 500 mm/s ja latoa ne kuormalavalle 0,8 mm:n toistettavuudella (kuva 3). Igusin paletointirobottiratkaisu maksaa jopa 60 % vähemmän kuin muut vastaavat järjestelmät.
 Kuva 3: Paletointi on yleinen ja tärkeä tehtävä tuotanto- ja logistiikkatoiminnassa, ja se voidaan automatisoida portaalirobotilla. (Kuvan lähde: Igus)
Kuva 3: Paletointi on yleinen ja tärkeä tehtävä tuotanto- ja logistiikkatoiminnassa, ja se voidaan automatisoida portaalirobotilla. (Kuvan lähde: Igus)
Deltarobotit
Deltarobotteja ovat portaalirobottien tavoin saatavana kahdella tai kolmella akselilla. Deltaroboteissa on työalueen yläpuolelle sijoitettu kupolin muotoinen työtila. Ne tarjoavat poikkeuksellisen suuren nopeuden, ja niitä käytetään usein materiaalinkäsittelyyn ja osien ladontaan. Esimerkkejä Igusin deltaroboteista:
- RBTX-IGUS-0047 on kolmiakselinen malli, jonka työtilan halkaisija on 660 mm. Sen tarkkuus on ±0,5 mm, enimmäishyötykuorma 5 kg, enimmäisnopeus 0,7 m/s ja se voi suorittaa jopa 30 poimintaa minuutissa. (Kuva 4).
- RBTX-IGUS-0059 on kaksiakselinen malli, jonka työtilan halkaisija on 700 mm. Myös sen tarkkuus on ±0,5 mm. Sen enimmäishyötykuorma on 5 kg, enimmäisnopeus on 2 m/s ja se voi suorittaa jopa 50 poimintaa minuutissa.
 Kuva 4: Esimerkki kolmiakselisesta deltarobotista Igus iRC -ohjausyksikön vieressä (vasemmalla). (Kuvan lähde: DigiKey)
Kuva 4: Esimerkki kolmiakselisesta deltarobotista Igus iRC -ohjausyksikön vieressä (vasemmalla). (Kuvan lähde: DigiKey)
Nivelvarsicobotit
iguverse tukee myös nivelvarsicobotteja. Coboteilla voi olla kahdesta kymmeneen akselia tai enemmän, joita kutsutaan myös vapausasteiksi (DOF). Niillä on yleensä suuret työtilat, ja ne voivat suorittaa kompleksisia tehtäviä yhteistyössä ihmisen kanssa. Igus-mallissa REBEL-6DOF-02 on 6 vapausastetta ja mallissa REBEL-4DOF-02 on 4 vapausastetta. Molempien tarkkuus on ±1 mm, nimellinen toiminta-alue on 400 mm, ja ne pystyvät vähintään 7 poimintaan minuutissa lineaarisella nopeudella 200 mm/s.
6 vapausasteen mallin enimmäishyötykuorma on 2 kg ja enimmäisulottuma 664 mm. 4 vapausasteen mallin enimmäishyötykuorma on 3 kg ja enimmäisulottuma 495 mm (kuva 5).
 and 6 DOF (right)") Kuva 5: Nivelvarsicobotit, joilla on 4 vapausastetta (vasen) ja 6 vapausastetta (oikea). (Kuvan lähde: Igus)
Kuva 5: Nivelvarsicobotit, joilla on 4 vapausastetta (vasen) ja 6 vapausastetta (oikea). (Kuvan lähde: Igus)
Yhteenveto
iguversen immersiivinen teollisuusmetaversumi yhdistää digitaaliset kaksoset ja virtuaalitodellisuuden ja tarjoaa työkalut, jotka mahdollistavat robottiratkaisujen nopean kehittämisen ja käyttöönoton. Se on ilmainen, lisenssivapaa ja suunniteltu paikalliseen käyttöön tietokoneella ilman pilviyhteyttä. Sen avulla voidaan kehittää ja testata robottiratkaisuja ilman robottia.
Se tukee monenlaista kinematiikkaa deltaroboteissa, portaaliroboteissa, robottikäsivarsissa (cobot) ja SCARA-roboteissa. IRC sisältää useita rajapintoja automaation ja toiminnallisten tarpeiden tueksi, kuten PLC-rajapinnan, Modbus TCP/IP:n, CRI Ethernetin, ROS-rajapinnan, rajapinnan kohteiden tunnistuskameroita varten ja pilvirajapinnan. Iguverse, iRC ja Igusin robotit on optimoitu tukemaan pk-yritysten kustannustehokkaita automaatiotarpeita.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.